Как говорится, гоночных квадриков много не бывает:) У меня уже есть один для фристайла, один - для гонок, а теперь хочу собрать еще один - для экспериментов. Каждый день появляется все больше интересного "железа" для гоночных квадриков. Ставить на отлаженные модели новые электронные компоненты как-то не хочется. Вот и будет такой себе квадрик, на котором экспериментировать не жалко.
За основу взял нижнюю пластину на 4мм от рамы RealAcc X210, которая является почти полным клоном Lumenier QAV-X. Кабинка из поликарбоната для QAV-X подошла почти идеально. Только передние отверстия в пластине пришлось расточить по полмиллиметра в стороны. Получилась очень простая и очень прочная рама всего из двух деталей:) Поликарбонат сломать - надо постараться! Но я способный:)
Сразу же примерил передатчик Eachine ET526. Встал без проблем. Очень понравилась его фиксация внутри верхней части.
Сначала я думал, что в кабинку потребуется передатчик с угловым разъемом, но это не так. Передатчик можно зафиксировать парой стяжек. Одна за корпус, вторая за антенный кабель.
В кабинке очень удачно расположен вырез под кнопку переключения каналов передатчика. Силовой разъем будет сзади. Под него есть фигурный вырез в кабинке. А я-то думал, что потребуется фиксатор XT60-разъема и купил их парочку.
Кабинку из поликарбоната для QAV-X помог получить друг с материка, так как в наши края Америка не шлет - санкции-с:) Спасибо ему огромное!
Моторы планирую поставить довольно мощные. На выбор есть два варианта: еще не выпущенный EMax TS2306 2400kV или T-Motor F40 2305 2400kV. Я уже достаточно насмотрелся на различные моторы и для себя сделал один вывод: чтобы квадрик хорошо подрывался, мотор должен быть намотан тонким проводом в несколько жил с очень плотной укладкой в пазы статора. Этим требованиям удовлетворяют три мотора. Два из них, про которые говорил выше, и Lumenier 2206 2350kV. Их-то мне и не купить:(
Хочу попробовать новые регуляторы EMax EMX-SC-1775 Bullet Series 35A 3-6S или проверенные RacerStar RS35A V2 2-6S. Зачем такие-то мощные? С запасом на будущее. Тенденция такая, что сейчас с гоночными квадриками происходит тоже самое, что было в свое время с вертолетами - надо больше мощности! А аккумуляторы пока не могут выдавать желаемые токи, у них тоже есть свой технологический предел. Поэтому остается поднимать только напряжение, то есть увеличивать количество банок в аккумуляторе. Так что в этом году будут популярны аккумуляторы на 5S и 6S. Потому и регуляторы нужны с поддержкой шести банок.
Полетный контроллер будет на F4-процессоре с гироскопами, способными поддерживать частоту работы в 32кГц. А может к тому времени и на F7 что-то появится:)
Камера, скорее всего, будет Foxeer Arrow V3 или аналогичная. Металлический корпус решает! Она является продолжением знаменитой Foxeer HS1177, а эта камера, по крайней мере для меня, остается эталоном. Как надоел аналог, когда же будет быстрая и доступная цифра...
Остальная начинка остается под вопросом. Все будет зависеть от того, что смогут предложить производители на тот момент, когда квадрик будет укомплектован регуляторами и моторами.
Оно работает! Делал все по инструкции. Подпаял три проводка от свободного UART-разъема к плате RealAcc HUBOSD ECO X. У меня был свободен UART2 на плате SP Racing F3 6DOF. Соединил UART-RX - HUBOSD-TX, UART-TX - HUBOSD-RX и общий. Общий можно было и не подпаивать, платы и так соединены.
Затем снял пропеллеры, подключил полетный контроллер к компьютеру, подключил аккумулятор, запустил конфигуратор BetaFlight. На вкладке CLI в командной строке ввел: serialpassthrough 1 115200
Первая цифра - номер UART-порта. Счет идет от нуля, поэтому для UART2 ставлю цифру один. Вторая цифра - скорость порта. Можно такую и оставить. Выключил конфигуратор. Не отключая аккумулятора и USB-разъем, запустил программу прошивки STOSD8 Tool, скачал самую свежую на сегодня прошивку версии 3.3 и без проблем залил ее в плату RealAcc HUBOSD ECO X по инструкции с сайта stosd.com. Все!
Совсем недавно озаботился проблемой крепления гоночного квадрика снаружи к рюкзаку. Вроде бы и мелочь, но возиться с пришиванием ремешков не очень-то хотелось. Так и забросил. А сегодня увидел вот такую интересную штуку:
Вроде и сложного ничего нет: две пластинки, четыре болтика и ремешок! Выглядит отлично, устанавливается легко и непринужденно:) И где оно раньше было, когда требовалось...
Вышел релиз прошивки BetaFlight-3.1.0 для полетных контроллеров гоночных квадриков. Релиз очень большой и значительный.
Приведу список изменений:
Добавлена поддержка F7-процессоров (ANYFCF7 - первый поддерживаемый кандидат...)
Динамическое распределение входов/выходов
Поддержка DSHOT для процессоров F3 и F4. Поддерживаются DSHOT150, DSHOT300, DSHOT600 и DSHOT1200 (читайте wiki о поддерживаемом оборудовании)
Полная поддержка операций с плавающей точкой на всех этапах полета
Много новых динамических настроек (фильтры, setpoint weights, прочее)
Поддержка телеметрии для регуляторов KISS (только для DSHOT)
Много оптимизаций кода (возможна более быстрая работа PID-регулятора на процессорах F3 и F4)
Поддерживается телеметрия регуляторов KISS (только с DSHOT)
Добавлено определение температуры и оборотов для регуляторов KISS
Добавлена поддержка serial passthrough (программирование регуляторов через полетный контроллер) для регуляторов KISS24 и CASTLE
Поддержка множества новых полетных контроллеров
Добавлена поддержка CMS для внешних OLED-экранов
Добавлена поддержка CSRF для TBS-приемников и связанной телеметрии
Добавлены дополнительные параметры OSD, такие как PID и данные по питанию
Добавлена поддержка SmartAudio для передатчиков TBS Unify
Добавлена поддержка MSP через Smartport
Автоматический выбор видео-формата для OSD
Множественные улучшения конфигуратора
Ускорение сборки прошивки. В этом есть необходимость, так как требуется сборка для многих полетных контроллеров
Исправлено определение огромных фреймов на полетных контроллерах, работающих через VCP-драйвер. Поэтому логи BlackBox будут загружаться немного быстрее
Новый параметр "anti_gravity_threshold" добавляет стабильности при резких перегрузках во время полета. Он применяется при быстрых скачках газа, когда квадрик находится в точке перехода от падения к подъему. В этих случаях параметр ITerm может вызвать нежелательные эффекты, такие как тряска или рысканье по руддеру. Это возникает из-за частых изменений от первоначального положения (due to
strong changes in accumulation polarities).
Защита от слишком частых изменений оборотов двигателей (для примера, если выбран протокол OENSHO125, тогда максимальная возможная скорость работы PID-регулятора и частота изменения скорости моторов будет 2кГц)
Добавлена экспериментальная поддержка частоты работы гироскопов на 32кГц
для тех гироскопов, которые это могут. Как правило, полетные контролеры
на F4-процессоре хорошо работают при частоте гироскопов 32кГц и частоте
PID-регулятора 16кГц. 32/32 - многовато для F4-процессора. Пока что
F7-процессор единственный, способный работать безотказно на частотах
32/32, даже со включенным акселерометром. Для включения поддержки
частоты 32кГц используйте команду gyro_use_32khz = ON. (Конфигуратор не
будет корректно отображать скорость работы, пока не будет ближайшего
обновления, но вы можете видеть реальное время работы цикла в строке
статуса). Заметка - только полетные контроллеры с гироскопами MPU6500,
MPU9250 и ICM-серий (типа ICM20689) поддерживают частоту работы 32кГц.
Улучшения в работе BlackBox (требует обновления BlackBox Explorer до версии 2.5.8 или выше)
Добавлено два новых параметра: level_angle_limit и
level_stick_sensitivity. Параметры задаются в градусах.
level_angle_limit - максимально допустимый угол наклона.
level_stick_sensitivity - максимальное отклонение квадрика при
максимальном отклонении стика.
Добавлена поддержка IRC для передатчиков Tramp (можно изменять канал, диапазон, мощность и pit-mode прямо с пульта)
Появилась в продаже новая плата распределения питания Matek HUBOSD8-SE. Основное отличие от других плат этого же производителя - заявленная поддержка 6S-аккумуляторов.
Да уж, начало года многообещающее:) Так и придется переходить на 6S-аккумуляторы на гоночных квадриках.
У новой платы интересно реализованы выводы под разъем питания. Его можно ставить как вертикально, так и горизонтально. Мощность датчика тока поднята до 184А. Еще бы найти аккумуляторы с такой токоотдачей:) Отдельными площадками сделан вход RSSI и выход показаний датчика тока. Между силовыми входами стоит мощный диод - защита от переполюсовки.
Вместо линейного BEC на 12 вольт теперь стоит импульсный BEC на 10 вольт. Пока еще сложно сказать, хорошо это или плохо. С линейным BEC не было проблем с видео, но сам BEC жутко грелся. Импульсный греться не будет, но что будет с видео - надо проверять.
Производитель обещал в следующих сериях платы HUBOSD поставить микросхему MAX4756 с питанием от 3.3В, но, судя по отсутствию стабилизатора на 3.3В на плате, этого не сделал. Микросхема все так же питается от 5В, а значит велика вероятность пропадания видео в полете при сбросе нагрузки. Но это небольшая проблема, когда уже знаешь, как с этим бороться:)
Оказывается, весь модельный ряд HUBOSD можно программировать прямо через полетный контроллер! Смотрим картинку:
Для этого надо подпаять к свободному UART-порту пару проводков: UART-RX - HUBOSD-TX и UART-TX - HUBOSD-RX. Затем снять пропеллеры, подключить аккумулятор, запустить конфигуратор и ввести команду:
serialpassthrough 0 115200
Где первая цифра - номер UART-порта, отсчет идет с нуля. Например для UART2 будет 1. Вторая цифра - скорость работы порта. Затем отключиться от конфигуратора, запустить программу STOSD Tool и прошить плату как обычно.
И это еще не все. Оказывается, можно заставить работать платы HUBOSD с BetaFlight OSD! Просто смотрим:
Видно, что от платы идут четыре проводка, но куда - не видно. Вроде как это новый полетный контроллер от Matek на F405. Можно ли так же сделать с другими полетными контроллерами - буду искать... Платы HUBOSD становятся все интереснее:)
Плата Matek HUBOSD8-SE с большой долей вероятности пройдет через мои руки, так что будет возможность рассмотреть ее поближе.
Давненько хотел попробовать полетать по дому по FPV, даже пытался переделать один из маленьких квадриков. Попытавшись понял, что не хватает мощности квадрику таскать на себе еще и камеру. Не очень квадрик летит на одно-баночном аккумуляторе. Решил попробовать двух-баночный вариант. Взял квадрик Eachine FatBee FB90.
Внешне очень прикольный:) Квадрик может комплектоваться приемником с протоколом DSM2, FlySky или FrSky. Краткие характеристики квадрика Eachine FatBee FB90:
База: 90мм
Размеры: 118x118x70мм
Вес без аккумулятора: 42 грамма
Вес с аккумулятором: 63 грамма
Полетный контроллер: SP RACING F3_EVO_Brush
Моторы: 8520
Размер пропеллеров: 40мм
Камера: 520TVL CMOS 1/4 дюйма
Видео-выход: PAL / NTSC
Видео-передатчик: 5.8 грамм, 25мВт 48 каналов
Аккумулятор: 400мА/ч 2S 25C
Приехала совсем небольшая коробочка. Как обычно, слегка помятая. Сбоку стоит отметка о типе приемника. Как видно на коробке, я выбрал модель с протоколом FrSky, позже расскажу почему.
В комплекте с квадриком шли два аккумулятора на 400мА/ч, два запасных мотора, инструкция (кто ее читает...), запасные зеленые пропеллеры, две липучки для аккумуляторов и одна ответная часть для квадрика, простенькое зарядное устройство, крышечка на объектив и металлический ключ для снятия пропеллеров.
Спереди расположена камера на 520TVL. Картинка с нее, прямо скажем, не как с HS1177:) Стоит линза градусов на 150 без искажения картинки. То есть, если смотреть на шкаф, то он будет прямоугольным, без бочки. Из-за этого есть огромные искажения перспективы. В центре объекты сильно отдаляются, а по бокам - приближаются. Не представляю, как в таком режиме летать.
Вестибулярка с трудом переварит такие издевательства:) Будет очень сложно в полете просчитывать расстояние до объектов. Вроде летишь в проем двери, он довольно далеко и тут вдруг как прыгнет на камеру! Разрешение камеры оставляет желать лучшего. Оно и неудивительно при сенсоре в четверть дюйма.
Конструкция квадрика Eachine FatBee FB90 предельно проста. Это карбоновая пластина толщиной 1.5мм снизу, пластиковая канопа сверху, пластиковые держатели моторов с защитой и начинка.
Аккумулятор будет устанавливаться снизу на липучку. Крепления моторов прикручены к раме на пару винтиков. Провода от моторов зафиксированы резиновыми колечками. Моторы размером 8.5x20мм.
Полетный контроллер построен на процессоре STM32F303 с гироскопами MPU6500 на шине SPI. В зависимости от модели, интегрирован приемник DSM2/FlySky/FrSky. Как говорил выше, я выбрал модель с приемником FrSky, так как он единственный подключен к полетному контроллеру по цифровой S.BUS-шине. Остальные приемники используют аналоговый PPM-сигнал, что уже можно считать анахронизмом.
Полетный контроллер поддерживает прошивки CleanFlight и BetaFlight. Я буду ставить BetaFlight, о чем и расскажу ниже. Не нашел на полетном контроллере выхода для пищалки, а без нее очень не просто летать на улице. Если летать по FPV и квадрик упадет в траву, то его будет не найти - проверено! Одного раза хватило упасть, чтобы полчаса бродить по полю c сухой травой в поисках:) Да и дома разок упал так, что не сразу смог найти квадрик.
На блоке камеры с передатчиком расположены две кнопки. Первая, которая ближе к объективу, служит для переключения режима работы камеры: PAL или NTSC. Вторая служит для выбора диапазона и канала передачи видео. Если нажать и подержать кнопку пару секунд, то переключается диапазон. Если просто нажимать кнопку, то переключается частота.
Аккумулятор у модели не очень обычный. Он хоть и двух-баночный, но не имеет балансировочного разъема! Да уж, заряжать такой будет крайне неудобно!
Изначально в полетном контроллере установлена прошивка CleanFlight, но BetaFlight мне как-то ближе и я его немного знаю. Но перед прошивкой я все же выдернул из полетного контроллера конфигурацию CleanFlight - пригодится! Скачать ее можно здесь. В ней подсмотрел, что приемник висит на UART2. Заодно выдернул стоковые PID-ы.
С прошивкой никаких проблем не возникло. Обратил внимание, что при подключении по USB подается питание на весь квадрик. То есть, работают и камера с передатчиком и все это довольно сильно греется! Даже моторы заводятся, так что будьте внимательны!
С процессом сопряжения приемника с передатчиком не было никаких проблем. Замкнул пинцетом контакты Bind в правом верхнем углу полетного контроллера, подключил USB-разъем, тем самым обеспечив питанием весь квадрик.
На полетном контроллере загорелся зеленый индикатор. Затем в передатчике указал протокол FrSky и нажал Bind. Через пару секунд зеленый индикатор на полетном контроллере погас. Обесточил квадрик и снова подал питание - зеленый индикатор пару раз моргнул и загорелся ровно. Все, квадрик стал откликаться на действия с пульта.
После небольшой настройки попробовал взлететь. Ох, тяжело же квадрик взлетает! Да еще обнаружилась пара неприятных моментов. Пропеллеры задевали за защиту при максимальном газе. А потом вообще стали попеременно отстреливаться с валов в потолок! И ладно бы с одного какого-нибудь мотора. Нет, отстреливало с любого! Ну красота!
Посмотрел-посмотрел на это дело и откусил защиту кусачками. Оставил только усики. А затем и пропеллеры заменил на трехлопастные диаметром 57мм. Вот с ними-то квадрик и полетел! Причем, отлично полетел!
Только спереди пропеллеры немного задевали за канопу. Поэтому паяльным феном немного нагрел канопу сверху и сплющил. Все, больше пропеллеры не задевают.
Стоковые аккумуляторы откровенно тяжеловаты для этого квадрика. Заменил их на аккумуляторы от вертолета XK K120 на 300мА/ч 25С. Крепление аккумуляторов на липучку очень неудобное, убрал его. Приклеил к раме толстый двухсторонний скотч и пропустил через раму резинку. Резинка выдернута из изношенной шины от самолета АН-2 , так что вполне может считаться авиационной:) Без такой квадрик не взлетит, даже не стоит и пробовать:) Получилась идеальная легкая фиксация аккумулятора. Силовой разъем так же заменил на балансировочный для двух-баночных аккумуляторов. После модификаций взлетный вес получился 56 грамм, что на 7 грамм меньше стокового, а сухой вес вышел 38.8. Отличный результат!
Не успел сделать и десятка полетов, как сломал один из лучей. Вроде и упал не сильно, но на жесткую поверхность. Слабая рама. У меня еще с самого начала была мысль усилить лучи карбоновыми палочками. А вообще, в таком размере пластиковая рама - наилучший выбор. Карбон тонкий и расслаивается. Имеет смысл перекинуть всю начинку на раму KingKong Q100.
После ремонта попробовал летать в режиме стабилизации. Подкрутил PID-ы и подтриммировал акселерометры. Если модель тянет в какую либо сторону, то надо приземлиться и стиками понемногу сделать так, чтобы квадрик висел ровно.
Не забывайте сохранить результат! Это так же делается стиками. На самом деле, триммирование не очень-то помогает. Все равно квадрик уплывает из точки. Главное сделать так, чтобы явно не тянуло в какую-либо сторону. А для этого достаточно просто откалибровать акселерометры.
Приведу свои текущие настройки: для полетного контроллера и передатчика. Это не конечные настройки, позже я еще буду долго и упорно настраивать PID-ы. Чтобы использовать настройки для полетного контроллера, надо перейти на вкладку CLI конфигуратора BetaFlight, скопировать содержимое файла и вставить в командную строку, нажать Enter. Затем надо написать там же команду save, нажать Enter - полетный контроллер перезагрузится. Затем надо подобрать поправку для делителя напряжения, чтобы полетный контроллер правильно определял текущее напряжение аккумулятора. Для этого нужно подключить аккумулятор к квадрику и тестером измерить текущее напряжение на аккумуляторе. Проверить, совпадают ли значения в поле Battery Voltage на вкладке Configuration. Если не совпадают, то, изменяя значение в поле Voltage Scale, нужно добиться того, что бы данные совпадали.
В передатчике настроил три полетных режима: FMOD0 - акро-режим, FMOD1 - режим стабилизации с возможностью делать флипы/роллы, FMOD2 - режим полной стабилизации. Арм/дизарм настроил на тумблер ELEV D/R: от себя - арм, к себе - дизарм. На GEAR повесил включение-отключение светодиодов. На AILE D/R сделал уменьшенные до 60% расходы для спокойных полетов по квартире.
Попробовал полетать на улице и в квартире. Ну что сказать, квадрик Eachine FatBee FB90 летит! Особенно с модификациями:) Конечно, еще нужна более тонкая настройка, но уже и так видно, что выбор модели с двух-баночным аккумулятором полностью себя оправдал.
Немного подкрутил PID-ы. Теперь при расходах 60% в акро-режиме летит очень точно и предсказуемо, почти как в режиме стабилизации.
Но если крутить флипы-роллы дома, то надо заставлять себя летать на полных расходах. Это очень сложно! Нужны нано-движения стиками. Позже видео добавлю.
Вот пока и все. В следующий раз расскажу о домашнем квадрике на бесколлекторных моторах:) Там придется очень сильно следить за полетным весом. Уже есть идея, как сделать очень легкую и очень прочную раму.
Появился анонс одной из самых привлекательных FPV-камер Foxeer Arrow V3!
Новая камера будет выпущена в четырех цветовых вариантах. Сенсор останется все тем же 1/3” Sony SUPER HAD II CCD, но добавится микрофон и OSD. Но самое вкусное - это корпус. Он алюминиевый! Корпус имеет по три отверстия для крепления с каждой стороны на все случаи жизни. Камера может питаться от напряжения 5-35 вольт.
На борту имеет два BEC: линейный на 12 вольт и импульсный на 5 вольт. Причем BEC на 5 вольт довольно мощный. Эх, не хватает только датчика тока для полного счастья. Вообще, сама тенденция появления таких плат PDB как бы намекает, что стоит ждать перехода на 6S в классе гоночных квадриков:) Это будет ужас-ужас!
Направление домашних FPV-квадриков на бесколлекторных моторах набирает обороты. Тут и скидки на моторы и комплекты с регуляторами образовались! Да, мельчают модели:)
Появился анонс микро-квадрика EMax BabyHawk на бесколлекторных моторах. Уже что-то внешне интересное!
База квадрика 85мм. Вес без защиты и аккумулятора 60 грамм. С аккумулятором и защитой 86 грамм. Много, непозволительно много! Моторы 1104 собственной конструкции на 5000kV, регуляторы на 6А с BLHeli_S, полетный контроллер собственной разработки EMax Femto F3. Питаться квадрик может аккумуляторов на 2-4 банки.
Еще один представитель этого класса Eachine Chaser88. Я не знаю, что там себе думают братья-китайцы, но в голове у них творится что-то необычное:)
Стойки под полетным контроллером из резиновых колечек! База, как видно из названия, 88мм. Моторы RacerStar BR1103 на 10000kV, блок регуляторов RacerStar RS6A V2 с поддержкой DSHOT, полетный контроллер на F3-процессоре. Питание от двух-баночного аккумулятора. Вес без аккумулятора 67 грамм, взлетный вес 90 грамм! Зачетный микро-кирпич!
Я не понимаю, неужели нельзя спроектировать что-то по настоящему легкое, в чем проблема-то? Это же ни разу не комнатные модели. Да, может они и летают быстро на улице. Но какой смысл летать на них на улице, когда есть 210-й размер, который не в пример мощнее и более адекватный в управлении. В общем, я в замешательстве...
Закончил сборку и предварительную настройку второго квадрика-близнеца из "народного" комплекта. Про сборку первого рассказывал здесь.
Со сборкой второго экземпляра возникла задержка из-за того, что испортил передатчик Eachine ET526, когда стал менять разъем с SMA на RP-SMA. Одно неосторожное движение и... оторвал вывод на антенну. В этот раз, сначала отпилил дремелем вывод центрального контакта от разъема, а остаток легко отпаял.
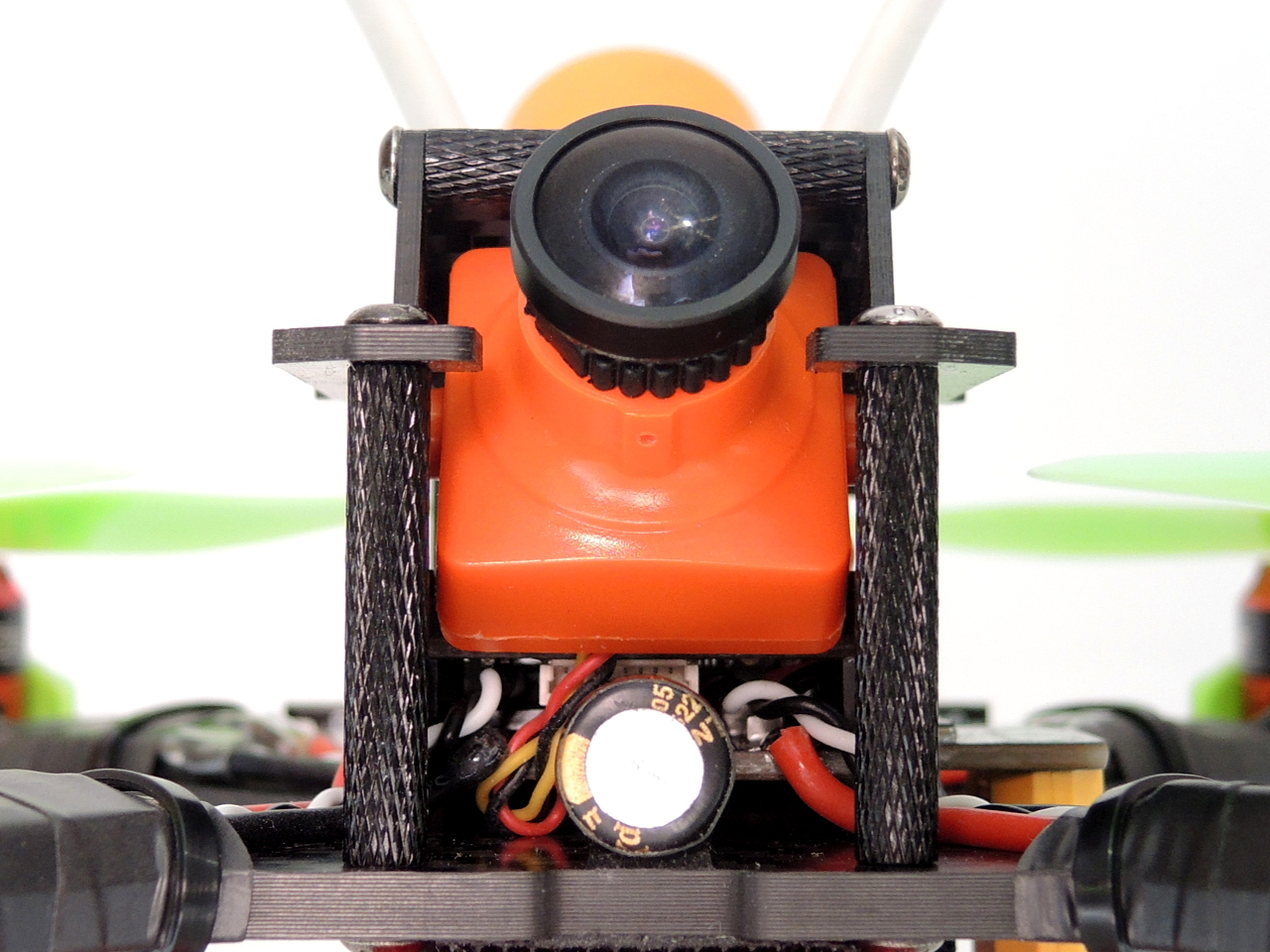
Кроме расцветки, квадрик почти ничем не отличается от предыдущего. Про это "почти" и расскажу ниже. Во первых, заменил корпус камеры Foxeer HS1177 на корпус от Foxeer HS1190.
Он более прочный, с латунными вставками. Камера фиксируется значительно жестче, чем с родным корпусом. Но угол наклона камеры регулировать сложнее, вернее почти совсем невозможно. Сверху камера упирается корпусом в площадку для экшен-камеры.
Регуляторы установил силовыми ключами к раме. Попробую так. Надеюсь, что регуляторы не сгорят. Все таки моторы не очень мощные и пиковых нагрузок не будет. Из-за этого силовые провода от регуляторов не пришлось делать крест-на-крест и монтаж получился более аккуратным.
Не люблю паять провода в виниловой изоляции, особенно когда провод идет на изгиб. Изоляция просто прорезается проводом и слезает. В итоге, из-за своей "криворукости", один из сигнальных проводов от регулятора получился коротковат. Так не хотелось менять провод, что решил попробовать припаять провода с полетному контроллеру снизу. В первом варианте паял сверху. На удивление, все провода удачно разместились между платой PDB и полетным контроллером, даже довольно свободно.
Когда менял разъем у передатчика Eachine ET526, то обнаружил, что сверху установлен радиатор из алюминиевой пластинки. Убрал его и этим уменьшил высоту передатчика почти на два миллиметра. Не думаю, что передатчик сгорит, не так сильно он и греется. Из-за этого места внутри рамы стало немного больше и все внутренности нормально упаковались.
Как ни странно, сухой вес получился все те же 340 грамм.
В регуляторы залил последнюю версию BLHeli 16.65 с поддержкой DSHOT. У этой версии мелодия больше нравится, чем у версии 16.6.
В полетный контроллер залил прошивку BetaFlight-3.1.0-RC8. Настройки скопировал от первой модели. К сожалению, переключение каналов видео-передатчика с пульта так и не заработало. Может к релизу прошивки и поправят. На всякий случай приведу свои файлы конфигурации для квадрика и передатчика. Ни PID-ы, ни расходы, ни экспоненты еще не настраивал. Только попробовал взлететь в комнате и все. Скоро будут испытания на улице!
В планах на будущее - собрать третий квадрик. Очень мощный, почти максимально. Будет под эксперименты, в том числе и с цифровым видео-линком.
Всего пару дней назад появилась информация о новых стиках на датчиках Холла для передатчика Таранис, а сегодня уже анонсирована их продажа!
Датчик Холла - это индикатор напряженности магнитного поля. На осях стика вместо переменных резисторов стоят такие датчики. Их плюс в том, что они не имеют контактирующих механических деталей, а значит и стачиваться ничего не будет. У переменных резисторов стачивается резистивный слой и тогда у стиков теряется точность, появляется дребезг в около-нулевой зоне, сбивается калибровка. С датчиками Холла такого не будет. Но тут тоже есть подвох. Если у переменного резистора величина сопротивления изменяется линейно, то у датчика Холла может и не быть линейности. Будет на стике как бы механическая экспонента. В общем, надо смотреть, пробовать. Найти бы такие датчики отдельно в продаже, чтобы в посадочные места для резисторов вставали...
Вчера друзья получили кучку регуляторов RacerStar RS30A V2. Сегодня забрал эту кучку к себе на модификацию для поддержки цифрового протокола DSHOT-600, как сказано в документации.
Снял термоусадку и... модифицировать ничего не надо! Конденсатор удалять не пришлось - все уже сделано! Регуляторы RacerStar RS30A V2 - однозначный MUST HAVE! Рекомендую!
Давненько не было новых вертолетов. И тут неожиданно появился почти что клон Walkera Master CP, только с бесколлекторным двигателем - вертолет WLToys V950! Конечно же, я сразу захотел его в коллекцию:)
Вертолет приехал в довольно большой коробке 53х28х15см. Доставка была через EMS курьером прямо к дому. Коробка почти не помялась. Внутри все было упаковано еще и в прозрачный пластик.
В комплекте с вертолетом WLToys V950 были инструкция, один аккумулятор на 1500мА/ч 25C, зарядное устройство, блок питания, передатчик, комплект основных лопастей, хвостовой винт, основная шестерня, набор хвостовых конических шестеренок, отвертка и шестигранный ключ.
Подробнее расскажу о составе комплекта, а потом разберусь с "основным блюдом":)
Передатчик ничем не отличается от того, что был в комплекте с первыми версиями WLToys V977 и WLToys V931.
Я надеялся, что хотя бы сделают разъем для подключения к симулятору, но увы... На его месте просто заглушка.
Передатчик питается от четырех элементов АА-размера. Включил его один раз, чтобы проверить работает или нет. Позже распотрошу на детали. Переменные резисторы от стиков вместе с проводами отлично подходят к передатчику DEVO-10:)
Зарядное устройство очень простое. Может заряжать двух- и трех-баночные аккумуляторы прямо через балансировочный разъем. Само собой, небольшими токами и долго.
Блок питания к зарядному устройству на 12В/2A. Разъем обычный, на 5.5мм. Приспособлю к какому-нибудь роутеру:)
Трехбаночный аккумулятор, который был в комплекте - это что-то! Его габариты 85x34x20мм. Вес 120 грамм.
Аккумулятор емкостью 1500мА/ч 25C. Силовой разъем - T-Plug. Разъем придется заменить на XT-60. И на модели тоже, иначе не найти запасных аккумуляторов:) Вообще, аккумулятор откровенно великоват. На модель такого размера подошел бы аккумулятор на 850-1000мА/ч, ну уж никак не на 1500мА/ч!
Теперь расскажу о самом вертолете WLToys V950. Со снятой канопой он выглядит так:
Мотор расположен по центру рамы. Впереди стоит блок приемника и стабилизации. Сервоприводы расположены как и у WLToys V977: впереди один, сзади два.Традиционно начну с хвоста.
Хвост сделан на коллекторном двигателе с конической передачей. Диаметр хвостового ротора 112мм. Пластиковый ротор сидит на алюминиевой втулке, а уже она надевается на вал диаметром 2мм. Так сделано, чтобы хвостовой ротор не мог провернуться на валу.
Диаметр хвостового вала откровенно маловат - будет часто гнуться. Не могу понять, зачем сделана понижающая коническая передача? В таком размере вертолета наоборот надо делать небольшой хвостовой ротор с высокими оборотами, так как с ротором большого диаметра будет невозможно летать при боковом ветре - парусность большая.
Немного разобрал хвостовой кейс. Внутри стоят фланцевые подшипники. Кстати, есть отверстия для крепления хвостового двигателя болтиками, но самих болтиков установлено не было. Мотор просто поджимается сзади пластиковой крышкой на защелках.
Хвостовой двигатель диаметром 15мм, длиной 32мм, довольно тяжелый. Хвост мне очень не понравился. Будут с ним большие проблемы. Да еще и бесколлекторный двигатель не поставить - нет подходящего регулятора:(
Хвостовая балка сделана из алюминиевой трубки диаметром 8мм. На ней установлен держатель подкосов.
Я разобрал эту конструкцию и под ней на балке обнаружил парочку отверстий. Именно за них и фиксируется держатель подкосов.
Хвостовая балка заходит в раму под задними сервоприводами. Снизу она зафиксирована болтиком.
С правого боку расположены правый и передний сервоприводы. Здесь же видно, что основная плата соединена с регулятором через JST-разъем. Так реализован подвод энергии для хвостового мотора. Силовой разъем соединен с регулятором очень тонкими проводами. Надо сразу же их заменить на такой же толщины, какие идут от аккумулятора.
С левого боку расположен левый сервопривод и собраны все провода. Тяги от сервоприводов до тарелки просто вставлены в отверстия качалок! Никаких шариков, все максимально упрощено.
Основной двигатель установлен по центру рамы. Никакой маркировки на нем не было. Разбирать его не хотелось, так что и размер статора неизвестен.
На блоке приемника и стабилизации установлены гироскопы MPU6050 на шине I2C. А модуль приема реализован на чипе Beken BK2423, совместимом с nRF24L01. Для управления вертолетом используется KN-протокол. Модель полностью совместима с пультами от WLToys V977 и WLToys V931, а так же с передатчиками DEVO, поддерживаемыми прошивкой Deviation, с установленным модулем nRF24L01, универсальным 3-в-1 или 4-в-1.
Шасси крепится к раме на четырех шурупчиках. Сами шасси гибкие и прочные, могут выдержать тяжелые аварии без проблем. Батарейный отсек рассчитан только под один размер аккумуляторов, что в таком классе вертолетов уже не очень удобно. Лучше бы сделали классическое крепление на липучке и ремешке.
Основная шестерня закреплена на валу винтиком с гайкой. Срежет этот винтик при первой же аварии. Я бы сразу заменил его на пластиковый - пусть срезает, зато остальное целым останется.
Сверху на основной шестерне есть насечки конической передачи, которая может быть использована для привода хвостового ротора через вал в хвостовой балке. Да и крепление балки в раме спроектировано как бы с учетом этого. Видимо для будущих моделей.
Когда снял регулятор и увидел на нем наклейку, то был просто в шоке! Большая тяжелая модель и... 15 ампер! Не, это перебор! Неудивительно, что силовые провода такие тонкие. Ни о каком активном пилотаже не может быть и речи. Хорошо, если получится тихонько полетать блинчиком:) На наклейке написано, что внутри стоит стабилизатор напряжения на 2 ампера - не верьте. Я снял термоусадку и под ней стоят два линейных стабилизатора 7805 по 500мА каждый.
Голова основного ротора установлена на полом стальном валу диаметром 4мм. Конструкция головы ничем не примечательная, все как обычно. Мне показались тонковатыми болтики фиксации лопастей диаметром 2мм. После тестового подлета в комнате, я заметил, что вертолет с замедлением реагирует на стики. Такое поведение может быть из-за слишком мягких демпферов. Решил подложить парочку шайб между резинками в голове и цапфами.
Голова очень сложно разбирается из-за винтиков под крестовую отвертку. Они к тому же еще и на локтайт посажены. С трудом раскрутил, чуть не сорвал шлицы. Межлопастный вал оказался диаметром 3мм и длиной 33мм. Очень надеялся, что хоть с головой основного ротора не будет проблем, но не тут-то было! В цапфах стоят обычные подшипники, как на маленьких вертолетах! Про упорные речи даже не идет. Цапфы и так туговато вращались на межлопастном валу, а с дополнительными шайбочками их просто заклинило. Видимо не судьба сделать вертолет хоть немного более отзывчивым в управлении:(
Со стоковым передатчиком можно разобраться, если почитать инструкцию от WLToys V977. Порядок каналов управления точно такой же как у WLToys V977:
1. Газ - в нормальном режиме. Шаг - в режиме 3D
2. Элероны
3. Элеватор
4. Руддер
5. Переключение расходов. +100 - двойные, -100 - нормальные
6. Включение холда. +100 - холд включен, -100 - выключен
7. Переключение полетных режимов. +100 - режим 3D, -100 - нормальный режим
8. Включение режима 6G. -100 - включен, +100 - выключен
9. Триммер шага
10. Триммер элерона
11. Триммер элеватора
Процедура сопряжения с передатчиком очень простая. Надо на приемнике зажать и подержать пару секунд кнопку на плате приемника. Начнет моргать красный индикатор. Потом включить пульт. В случае с передатчиком DEVO - нажать кнопку Bind в настройках модели. Кстати, вот моя конфигурация под передатчик DEVO-10 для WLToys V950.
Пока что на улице погода не летная - мороз и снег, решил попробовать вертолет в комнате.
Летит WLToys V950 странно. На управление реагирует непривычно медленно. Либо из-за мягких демпферов в голове, либо из-за слабых сервоприводов. А может быть и из-за всего вместе. Руддер приходится все время поддергивать влево - мощности хвоста не хватает. Стабилизация не очень. Видно, как в полете вертолет стало раскачивать. И это в 3D-режиме! Боюсь подумать, что будет в 6G - даже не пробовал.
Складывается такое ощущение, что просто взяли и увеличили WLToys V977. Сервоприводы какие-то миниатюрные, слабые для такого размера ротора. Тяги без шариков на качалках. Силовые провода очень тонкие. Аккумулятор огромный и со слабой токоотдачей. Регулятор откровенно слабый. Хвост тяжелый и малопроизводительный. Подшипники в цапфах просто смех. Не, такая модель нормально не полетит. Слишком много слабых мест. Замена силового разъема на XT-60 и более толстые силовые провода не исправили ситуацию.
В общем, от вертолета WLToys V950 я не в восторге. Модель очень начального уровня. По сути, просто повисеть. Ни о каком активном пилотаже речь вообще не идет! А еще нет возможности заменить коллекторный двигатель на хвосте на бесколлекторный - нет и, видимо, не будет подходящего быстрого регулятора для этого. Я надеялся с минимальными модификациями получить небольшого тренера двухсотого размера, а сейчас даже нет желания им заниматься. Лучше накоплю на Blade 130S:) Он-то хоть из коробки полетит нормально - в этом я уверен!