
Тема FPV-полетов давно привлекает. Квадрокоптер Eachine Racer 250 пришелся очень кстати - появилась возможность поближе ознакомиться с предметом.
Коробка с моделью пришла довольно помятая. Внутри все оказалось в порядке. Квадрокоптер с аксессуарами был плотно упакован в пенистый материал.

В комплекте есть все необходимое для быстрого старта. Нужно только иметь свои передатчик и приемник. Для получения картинки с камеры так же потребуется еще и FPV-оборудование: монитор и приемник.

Перечислю, что было в комплекте: собственно квадрокоптер Eachine Racer 250, FPV-антенна, два комплекта пропеллеров Diatone 5х3: черные и белые, набор проводов для подключения приемника, фирменный ремешок для пульта, простенькое зарядное устройство с сетевым кабелем, карбоновый ключ для установки пропеллеров и аккумулятор 1500мА/ч 3S 25C.
Сразу же я разобрал квадрокоптер, чтобы все проверить, а заодно и показать все детали. На верхней карбоновой части рамы расположена площадка на красных силиконовых демпферах для установки экшен-камеры. С другой стороны закреплен видео-передатчик на 600мВт.

Почти что под площадкой для экшен-камеры находится красная кнопочка. Здесь же и гнездо для установки передающей антенны. Кнопочка служит для того, чтобы немного смещать по экрану OSD-данные.

Рядом с гнездом устрашающая надпись о том, что нужно обязательно установить антенну прежде чем подавать питание на квадрокоптер. Иначе передатчик может запросто сгореть.
Между верхней частью рамы и пластиковыми лучами установлены карбоновые прокладки.

Между нижней и верхней частями рамы установлена текстолитовая вставка. Судя по липучке, на эту деталь рамы предполагается установка сателлита, так как обычный приемник в пространство между верхней площадкой и этой вставкой просто не влезет.

Нижняя часть рамы выполнена из текстолита и содержит разводку для питания и управления регуляторами, стабилизатор питания и разъемы для подключения других элементов квадрокоптера.

С обратной стороны нижняя часть рамы обклеена пористым материалом. Видимо предполагается, что таким образом это защитит раму от ударов.

Но что-то мне подсказывает, что если на квадрокоптере активно летать и почти не падать, то вся эта защита со временем превратится в труху.
В передней части рамы установлен полетный контроллер CC3D. Да уж, чтобы подключить к нему USB-шнур для настройки, не разбирая рамы, придется сильно изловчиться.

Чуть спереди расположен стабилизатор питания на 5 вольт. С левой стороны находится выключатель подсветки квадрокоптера.

Причем с его помощью можно выбрать цвет подсветки задних огней квадрокоптера. Задняя светодиодная панель зафиксирована только пайкой к нижней части рамы.

Здесь же расположен силовой разъем XT-60 для подключения аккумулятора. Удобное решение - меньше проводов.

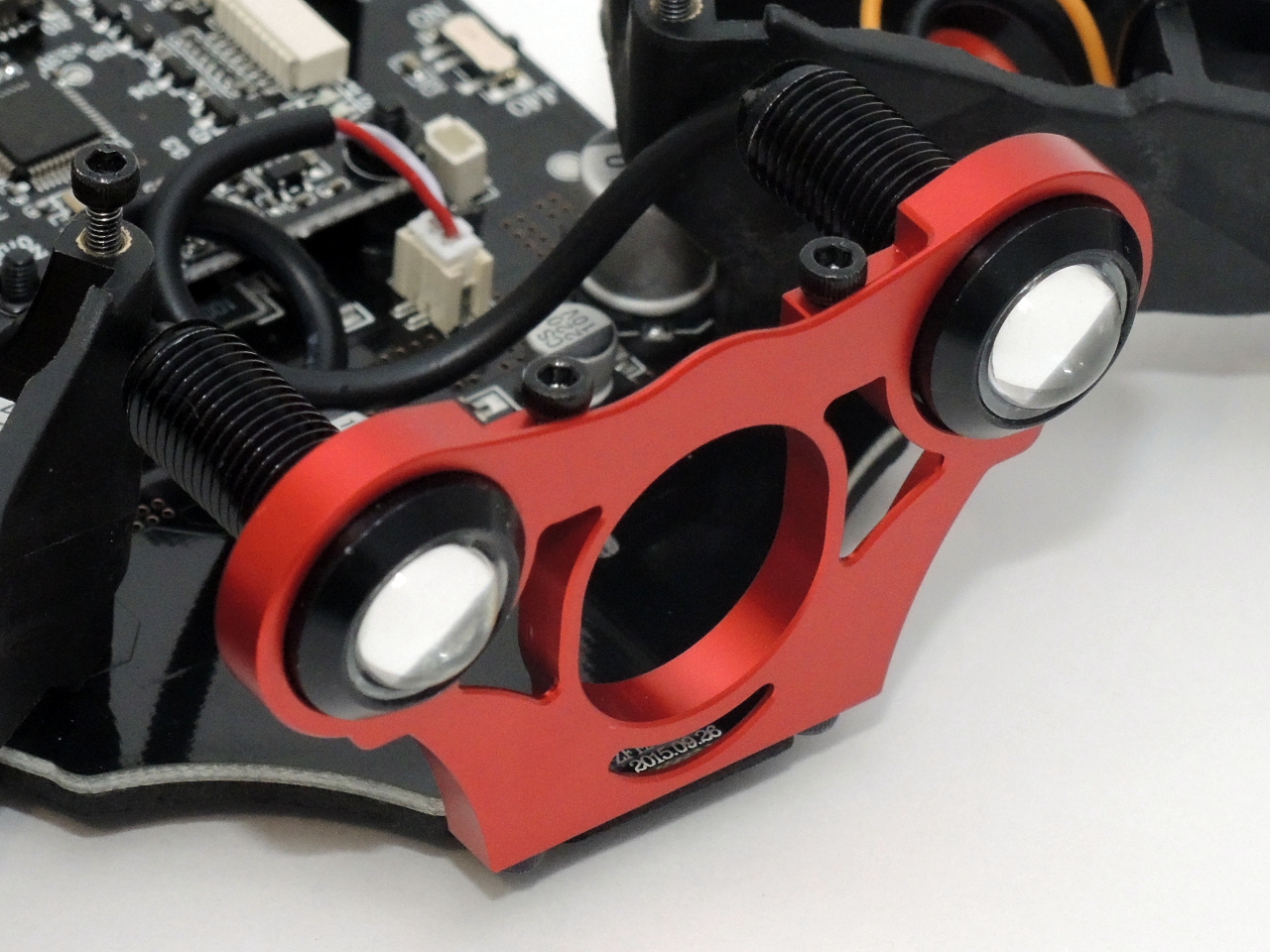
В передней части квадрокоптера Eachine Racer 250 установлены белые сверхяркие светодиоды мощностью по 3Вт каждый. Они закреплены на красивом алюминиевом кронштейне. Передние огни даже днем видно довольно далеко.
На квадрокоптере установлена CMOS видеокамера на 1000TVL с объективом на 2.8мм. Камера отлично показывает даже при низкой освещенности.

Перехожу к начинке лучей. Сами лучи изготовлены из прочного карбонизированного пластика. Я уже встречал подобный пластик на других моделях.

В углублении на луче закреплен стяжкой регулятор на 12А с прошивкой SimonK. На квадрокоптере установлены двигатели 2204 на 2300kV.

Довольно неплохие моторы, намотаны вполне прилично. Расстроили гайки крепления пропеллеров - они без отверстия. По опыту знаю, что фиксировать пропеллеры в поле ключем - развлечение для особо терпеливых. Разве что носить с собой накидную головку.

Передающая антенна в комплекте - самый обычный клевер. Для полноты картины сфотографировал и ее.

Пропеллеры Diatone 5х3 довольно мягкие. Хотелось бы большей жесткости. Ну ничего, это все равно расходники - потом обзаведемся нормальными.

Аккумулятор из комплекта неизвестного производителя 1500мА/ч 3S 25C. Будет использоваться только для настройки и первых полетов. Позже будут приобретены аккумуляторы ONBO 1600мА/ч 3S 45C.
Зарядное устройство совсем простенькое, даже без балансировки банок между собой. Позволяет заряжать аккумуляторы на 2 или 3 банки.

Я уже ремонтировал аналогичное зарядное устройство - сгорают там микросхемы, которые отвечают за контроль напряжения на банках.

Ремешок для передатчика очень даже ничего, вполне годный, с регулировкой длины и удобным карабином.
Теперь нужно установить приемник. Ранее планировалось использовать квадрокоптер с передатчиком Walkera DEVO7, поэтому был приобретен приемник Walkera RX601. Но позже было решено подключить квадрокоптер Eachine Racer 250 к передатчику Walkera DEVO10 с прошивкой Deviation. Подключение оказалось элементарным и не вызвало никаких проблем. Вот схема подключения:

Я извлек первые черный и красный провода из своих разъемов и вставил их в разъем с белым проводом, чтобы обеспечить питание приемника. Приемник устанавливается сверху на толстый двухсторонний скотч. Затем фиксируется стяжкой.

Расскажу процедуру сопряжения приемника Walkera RX601 c передатчиком Walkera DEVO10 с прошивкой Deviation:
- В передатчике создать новую модель, выбрать протокол DEVO и очистить FixedID, если стоит. Выключить передатчик.
- На приемнике Walkera RX601 нажать и удерживать кнопку Clean, подать питание на приемник, подождать несколько секунд, убрать питание с приемника и отпустить кнопку Clean.
- Включить передатчик и быстро подать питание на приемник. Через несколько секунд индикатор на приемнике будет гореть ровным красным цветом. Все, сопряжение состоялось.
- Зайти в настройки модели в передатчике, открыть поле FixedID. Там будет стоять шестизначное число. Нажать DONE, чтобы значение сохранилось. Теперь, при следующем включении передатчика, не будет автоматически появляться окно сопряжения.
Осталась только одна процедура - настройка полетного контроллера CC3D. Для этого скачиваю OpenPilot и устанавливаю. Последняя версия с поддержкой CC3D - это 15.02.02, более новые версии выходят без поддержки CC3D. В качестве руководства использовал это видео:
Все получилось с первого раза. На этом этапе настройки передатчика были минимальны. Позже завершил настройку, вот что получилось для Walkera DEVO10 с прошивкой Deviation. Добавил экспоненты, расходы, привычный холд и три полетных режима. Квадрокоптер Eachine Racer 250 полетел сразу, без какого-либо шаманства. Ну, по крайней мере в комнате.
Удалось опробовать квадрокоптер на улице, причем в морозную ветреную погоду - отлично летает! И на прочность заодно испытали - была небольшая авария. Все осталось целым.
Это первый квадрокоптер 250-го класса, который мне удалось подробно рассмотреть и попробовать. Тема интересная, может соберусь и себе что-то подобное сделать. Но не для того, чтобы блинчиком полетать, это точно:)
Все получилось с первого раза. На этом этапе настройки передатчика были минимальны. Позже завершил настройку, вот что получилось для Walkera DEVO10 с прошивкой Deviation. Добавил экспоненты, расходы, привычный холд и три полетных режима. Квадрокоптер Eachine Racer 250 полетел сразу, без какого-либо шаманства. Ну, по крайней мере в комнате.
Удалось опробовать квадрокоптер на улице, причем в морозную ветреную погоду - отлично летает! И на прочность заодно испытали - была небольшая авария. Все осталось целым.
Это первый квадрокоптер 250-го класса, который мне удалось подробно рассмотреть и попробовать. Тема интересная, может соберусь и себе что-то подобное сделать. Но не для того, чтобы блинчиком полетать, это точно:)