30 декабря 2016
Паровой микродвигатель!
Зашел сегодня к другу в магазин и увидел такое чудо - паровой микродвигатель! Еще и рабочий! Да, это вам не проводки паять!
28 декабря 2016
pepperF1SH - по настоящему комнатный квадрик на бесколлекторных моторах
Тема миниатюрных летательных аппаратов мне всегда была интересна. Сегодня попался в сети интересный проект супер-миниатюрного FPV-квадрика на бесколлекторных моторах pepperF1SH.

Квадрик построен на самодельной раме из карбона толщиной 0.8мм. На раме установлены двигатели RacerStar BR1103 10000kV. Квадрик питается от однобаночного аккумулятора на 200мА/ч. Взлетный вес с аккумулятором всего 32.4 грамма. По настоящему комнатный вариант!
Разработчик квадрика pepperF1SH пошел настолько далеко, что кроме рамы спроектировал и собственный миниатюрный блок регуляторов tinyPEPPER ESC на 5А с поддержкой прошивки BLHeli_S весом 1.4 грамма!

Но и это еще не все. Умелец сделал и собственный полетный контроллер tinyFISH FC весом 1.7 грамм! Полетный контроллер построен на базе процессора STM32F303, имеет на борту встроенный приемник FrSky, гироскопы MPU6000 на шине SPI, блэкбокс, датчик тока и контроль напряжения, выход для пищалки.

И все это богатство автор проекта планирует сделать в открытом доступе. Вот уж по настоящему щедрый подарок! Я даже знаю, кто тут же наладит производство клонов и будет продавать их на BangGood:) Видимо 2017-й год будет годом миниатюризации.

Квадрик построен на самодельной раме из карбона толщиной 0.8мм. На раме установлены двигатели RacerStar BR1103 10000kV. Квадрик питается от однобаночного аккумулятора на 200мА/ч. Взлетный вес с аккумулятором всего 32.4 грамма. По настоящему комнатный вариант!
Разработчик квадрика pepperF1SH пошел настолько далеко, что кроме рамы спроектировал и собственный миниатюрный блок регуляторов tinyPEPPER ESC на 5А с поддержкой прошивки BLHeli_S весом 1.4 грамма!

Но и это еще не все. Умелец сделал и собственный полетный контроллер tinyFISH FC весом 1.7 грамм! Полетный контроллер построен на базе процессора STM32F303, имеет на борту встроенный приемник FrSky, гироскопы MPU6000 на шине SPI, блэкбокс, датчик тока и контроль напряжения, выход для пищалки.

И все это богатство автор проекта планирует сделать в открытом доступе. Вот уж по настоящему щедрый подарок! Я даже знаю, кто тут же наладит производство клонов и будет продавать их на BangGood:) Видимо 2017-й год будет годом миниатюризации.
27 декабря 2016
HUBOSD - почему пропадает видео?
Собрав новый квадрик, обнаружил проблему с пропаданием видео при резкой подаче газа, о чем там ниже и написал. Пришло время разобраться с проблемой и решить ее. Тем более, судя по сообщениям из социальных сетей и с тематических форумов, проблема массовая, но решения пока нет, только различные костыли. Все списывают на плохое качество плат, с чем я не согласен.
На квадрике использовалась PDB HUBOSD. Квадрик имеет возможность передавать телеметрию на пульт. В том числе и напряжение на приемнике, то есть на всей шине 5 вольт, так как приемник питается от BEC на 5 вольт, расположенного на плате PDB. При резкой подаче газа, пульт изредка попискивал, сигнализируя о низком напряжении на шине 5 вольт. В эти моменты у квадрика пропадало видео. Пилоту на короткое время был виден просто черный экран.
Стал анализировать ситуацию. Если виден только черный экран, а не помехи, значит передатчик работает исправно. Так как с отключенной камерой видно так же черный экран. Если бы были проблемы с камерой, то был бы виден черный экран с данными OSD, но данных не было. Значит камера не причем, а видео пропадает на выходе с OSD.
Хорошо, виновник установлен - это блок OSD. Большинство современных OSD построены на микросхеме MAX7456. Это и популярная платка micro MinimOSD, и PDB HUBOSD, и другие платы PDB и полетные контроллеры со встроенным OSD. Отличается только полетный контроллер BrainFPV RE1, у него вывод OSD реализован мощностями процессора STM32F446RET6.

Посмотрев характеристики микросхемы MAX7456, обнаружил, что у нее очень узкий диапазон рабочего напряжения 4.75-5.25 вольта. То есть при резкой подаче газа, напряжение на шине 5 вольт проседало ниже 4.75 вольта и OSD просто отключалось! Стал выяснять, почему так происходит.
Для начала измерил напряжение на шине 5 вольт у трех различных плат HUBOSD. На одной из них было напряжение 5.13, на второй 4.90, а на третьей 4.95 вольт. Нормальный такой разброс! Так вот, на квадриках стояли только две платы с крайними значениями. У квадрика с напряжением 5.13 вольт никаких исчезновений видео не было, даже при самой жестокой нагрузке на аккумулятор (там стоят двигатели DYS SE2205 2300kV). А у квадрика с напряжением 4.90 видео пропадало даже при резком развороте!
Импульсный стабилизатор напряжения на 5 вольт у большинства популярных плат PDB, типа Matek PDB и HUBOSD, построен на микросхеме MP2315. По документации, микросхема способна выдерживать ток до 3А. Так что вряд ли полетный контроллер, приемник, OSD, светодиоды, пищалка и камера, висящие на шине 5 вольт, вместе могут потреблять больше трех ампер.

То есть провал напряжения обусловлен не большой нагрузкой на шину 5 вольт, а особенностями работы стабилизатора MP2315. Может он не успевает среагировать на изменение внешнего напряжения, может еще что - не вникал. Для себя просто сделал вывод, что надо поднять напряжение на шине 5 вольт чуть выше, до 5.10-5.15 вольт, тогда, как показала практика, видео пропадать не будет.
Можно еще использовать костыль в виде дополнительного большого конденсатора на шине 5 вольт. Частично это решит проблему - проверено. Но если квадрик будет совершать какой-либо длительный силовой маневр, то при его завершении вас будет ждать сюрприз - исчезновение видео:) Да, конденсатор необходим, но он не решит проблему радикально.
В общем, путь решения проблемы определен - буду поднимать напряжение на шине 5 вольт. Рассматривая документацию микросхемы MP2315, нашел схему типового подключения. Выходное напряжение задается связкой резисторов, подключенных к восьмой ноге микросхемы. Здесь же была и формула расчета управляющего сопротивления.

Пройдясь тестером по плате HUBOSD, обнаружил все три резистора из типовой схемы подключения.

Резисторы были промаркированы: RT - 30C, R1 - 54C, R2 - 682. Обратившись к таблице кодов, узнал номиналы резисторов: RT - 20кОм, R1 - 35.7кОм, R2 - 6.8кОм. Попробую рассчитать выходное напряжение для этого набора резисторов, используя формулу из документации MP2315, которую привел выше, приведя ее к соответствующему виду:
V = 0.8*((R1/R2) + 1)
V = 0.8*((35700/6800) +1) = 5В
Да, в теории номиналы резисторов подобраны правильно, расчетное напряжение получается 5 вольт. Но не учитываются такие факторы, как разброс значений при производстве резисторов:) Не все резисторы, промаркированные одинаково, будут иметь одинаковое сопротивление. Из-за этого и происходит разброс значений напряжения у одинаковых плат. Нет вины производителя, нет вины проектировщика платы, проблема исключительно в разбросе значений сопротивления компонентов. Так что, кому-то достанется плата с напряжением на шине 5 вольт в 5.13, а кому-то может и с напряжением в 4.90. Как повезет.
Так же не учитывается нагрузка на стабилизатор напряжения. Если посмотреть документацию на микросхему MP2315, то там есть графики падения выходного напряжения в зависимости от нагрузки. Оно хоть и небольшое, но есть и это надо учитывать.
Напряжение буду регулировать резистором R2 согласно схеме. Для этого, используя формулу выше, рассчитаю величину сопротивления резистора R2 для напряжения 5.15 вольт.
R2 = R1/((V/0.8) - 1)
R2 = 35700/((5.15/0.8) - 1) = 6565Ом
Сопротивление с таким номиналом найти будет крайне трудно, поэтому пойду по другому пути. Вспомнив курс электротехники, решил просто подобрать дополнительное сопротивление и припаять его сверху к резистору R2, который на 6.8кОм. При параллельном соединении резисторов значение результирующего сопротивления вычисляется по формуле:
R = 1/(1/R1 + 1/R2)
Поскольку результат-то уже известен, то есть R = 6565Ом, надо вычислить величину дополнительного сопротивления. Пусть дополнительное сопротивление будет R1, а известное нам R2 = 6.8кОм:
R1 = 1/(1/R - 1/R2)
R1 = 1(1/6565 - 1/6800) = 189965Ом
Да уж, резистор и с таким номиналом будет не найти:) Но тут уже допустимы приблизительные величины. Просто надо найти резистор на 180кОм - это возможно. Перерыв весь свой хлам, я нашел резистор! Он промаркирован цифрой 184. Попробую вычислить величину итогового сопротивления:
R = 1/(1/R1 + 1/R2)

При неправильных расчетах и неверно подобранном резисторе можно легко и непринужденно спалить микросхему MAX7456. Так что снимаю с себя всю ответственность:) Если кто-нибудь будет повторять сей эксперимент, то будет делать это на свой страх и риск!
Теория подтвердилась практикой. Видео больше не пропадает при любых нагрузках! Напряжение на шине 5 вольт так же больше не просаживается ниже пяти вольт:) Не нужны никакие дополнительные конденсаторы. Проблема решена навсегда!
Подведу итог. Если вы используете OSD на микросхеме MAX7456 и у вас при резкой нагрузке пропадает видео на квадрике, то обеспечьте надежное питание микросхеме в 5 вольт и следите за тем, чтобы напряжение не опускалось ниже порогового значения в 4.75 вольта. Вот и все, удачных полетов!
На квадрике использовалась PDB HUBOSD. Квадрик имеет возможность передавать телеметрию на пульт. В том числе и напряжение на приемнике, то есть на всей шине 5 вольт, так как приемник питается от BEC на 5 вольт, расположенного на плате PDB. При резкой подаче газа, пульт изредка попискивал, сигнализируя о низком напряжении на шине 5 вольт. В эти моменты у квадрика пропадало видео. Пилоту на короткое время был виден просто черный экран.
Стал анализировать ситуацию. Если виден только черный экран, а не помехи, значит передатчик работает исправно. Так как с отключенной камерой видно так же черный экран. Если бы были проблемы с камерой, то был бы виден черный экран с данными OSD, но данных не было. Значит камера не причем, а видео пропадает на выходе с OSD.
Хорошо, виновник установлен - это блок OSD. Большинство современных OSD построены на микросхеме MAX7456. Это и популярная платка micro MinimOSD, и PDB HUBOSD, и другие платы PDB и полетные контроллеры со встроенным OSD. Отличается только полетный контроллер BrainFPV RE1, у него вывод OSD реализован мощностями процессора STM32F446RET6.

Посмотрев характеристики микросхемы MAX7456, обнаружил, что у нее очень узкий диапазон рабочего напряжения 4.75-5.25 вольта. То есть при резкой подаче газа, напряжение на шине 5 вольт проседало ниже 4.75 вольта и OSD просто отключалось! Стал выяснять, почему так происходит.
Для начала измерил напряжение на шине 5 вольт у трех различных плат HUBOSD. На одной из них было напряжение 5.13, на второй 4.90, а на третьей 4.95 вольт. Нормальный такой разброс! Так вот, на квадриках стояли только две платы с крайними значениями. У квадрика с напряжением 5.13 вольт никаких исчезновений видео не было, даже при самой жестокой нагрузке на аккумулятор (там стоят двигатели DYS SE2205 2300kV). А у квадрика с напряжением 4.90 видео пропадало даже при резком развороте!
Импульсный стабилизатор напряжения на 5 вольт у большинства популярных плат PDB, типа Matek PDB и HUBOSD, построен на микросхеме MP2315. По документации, микросхема способна выдерживать ток до 3А. Так что вряд ли полетный контроллер, приемник, OSD, светодиоды, пищалка и камера, висящие на шине 5 вольт, вместе могут потреблять больше трех ампер.

То есть провал напряжения обусловлен не большой нагрузкой на шину 5 вольт, а особенностями работы стабилизатора MP2315. Может он не успевает среагировать на изменение внешнего напряжения, может еще что - не вникал. Для себя просто сделал вывод, что надо поднять напряжение на шине 5 вольт чуть выше, до 5.10-5.15 вольт, тогда, как показала практика, видео пропадать не будет.
Можно еще использовать костыль в виде дополнительного большого конденсатора на шине 5 вольт. Частично это решит проблему - проверено. Но если квадрик будет совершать какой-либо длительный силовой маневр, то при его завершении вас будет ждать сюрприз - исчезновение видео:) Да, конденсатор необходим, но он не решит проблему радикально.
В общем, путь решения проблемы определен - буду поднимать напряжение на шине 5 вольт. Рассматривая документацию микросхемы MP2315, нашел схему типового подключения. Выходное напряжение задается связкой резисторов, подключенных к восьмой ноге микросхемы. Здесь же была и формула расчета управляющего сопротивления.

Пройдясь тестером по плате HUBOSD, обнаружил все три резистора из типовой схемы подключения.

Резисторы были промаркированы: RT - 30C, R1 - 54C, R2 - 682. Обратившись к таблице кодов, узнал номиналы резисторов: RT - 20кОм, R1 - 35.7кОм, R2 - 6.8кОм. Попробую рассчитать выходное напряжение для этого набора резисторов, используя формулу из документации MP2315, которую привел выше, приведя ее к соответствующему виду:
V = 0.8*((R1/R2) + 1)
V = 0.8*((35700/6800) +1) = 5В
Да, в теории номиналы резисторов подобраны правильно, расчетное напряжение получается 5 вольт. Но не учитываются такие факторы, как разброс значений при производстве резисторов:) Не все резисторы, промаркированные одинаково, будут иметь одинаковое сопротивление. Из-за этого и происходит разброс значений напряжения у одинаковых плат. Нет вины производителя, нет вины проектировщика платы, проблема исключительно в разбросе значений сопротивления компонентов. Так что, кому-то достанется плата с напряжением на шине 5 вольт в 5.13, а кому-то может и с напряжением в 4.90. Как повезет.
Так же не учитывается нагрузка на стабилизатор напряжения. Если посмотреть документацию на микросхему MP2315, то там есть графики падения выходного напряжения в зависимости от нагрузки. Оно хоть и небольшое, но есть и это надо учитывать.
Напряжение буду регулировать резистором R2 согласно схеме. Для этого, используя формулу выше, рассчитаю величину сопротивления резистора R2 для напряжения 5.15 вольт.
R2 = R1/((V/0.8) - 1)
R2 = 35700/((5.15/0.8) - 1) = 6565Ом
Сопротивление с таким номиналом найти будет крайне трудно, поэтому пойду по другому пути. Вспомнив курс электротехники, решил просто подобрать дополнительное сопротивление и припаять его сверху к резистору R2, который на 6.8кОм. При параллельном соединении резисторов значение результирующего сопротивления вычисляется по формуле:
R = 1/(1/R1 + 1/R2)
Поскольку результат-то уже известен, то есть R = 6565Ом, надо вычислить величину дополнительного сопротивления. Пусть дополнительное сопротивление будет R1, а известное нам R2 = 6.8кОм:
R1 = 1/(1/R - 1/R2)
R1 = 1(1/6565 - 1/6800) = 189965Ом
Да уж, резистор и с таким номиналом будет не найти:) Но тут уже допустимы приблизительные величины. Просто надо найти резистор на 180кОм - это возможно. Перерыв весь свой хлам, я нашел резистор! Он промаркирован цифрой 184. Попробую вычислить величину итогового сопротивления:
R = 1/(1/R1 + 1/R2)
R = 1/(1/180000 + 1/6800) = 6552Ом
Подставлю результат в формулу расчета выходного напряжения, где R2 = 6552Ом:
V = 0.8*((R1/R2) + 1)
V = 0.8*((35700/6552) +1) = 5.15В
Ну вот, все вполне подходит! Смело припаиваю резистор на 180кОм поверх резистора на 6,8кОм и проверяю результат.

Как и ожидалось, напряжение на шине 5 вольт немного поднялось и составило 5,10 вольт. Немного меньше расчетного, но вполне достаточное, чтобы микросхема MAX7456 перестала отключаться. Хотя на этой плате напряжение и было 4.95, а поднялось до 5.10, то есть вполне расчетно и с учетом погрешности:) На второй плате, уже установленной на квадрик, с помощью резистора на 150кОм удалось поднять напряжение с 4.90 до 5.12 вольт.
Экспериментальным путем выяснил, что напряжения в 5.10 вольт недостаточно, видео все равно пропадает при резком сбросе газа и напряжение просаживается до 5.01-5.02 вольта. Надо поднимать еще выше, до 5.15 вольта.
Таким способом можно регулировать выходное напряжение на любом импульсном BEC с микросхемой MP2315, да и с большинством других, если найти их документацию.
Экспериментальным путем выяснил, что напряжения в 5.10 вольт недостаточно, видео все равно пропадает при резком сбросе газа и напряжение просаживается до 5.01-5.02 вольта. Надо поднимать еще выше, до 5.15 вольта.
Таким способом можно регулировать выходное напряжение на любом импульсном BEC с микросхемой MP2315, да и с большинством других, если найти их документацию.
При неправильных расчетах и неверно подобранном резисторе можно легко и непринужденно спалить микросхему MAX7456. Так что снимаю с себя всю ответственность:) Если кто-нибудь будет повторять сей эксперимент, то будет делать это на свой страх и риск!
Теория подтвердилась практикой. Видео больше не пропадает при любых нагрузках! Напряжение на шине 5 вольт так же больше не просаживается ниже пяти вольт:) Не нужны никакие дополнительные конденсаторы. Проблема решена навсегда!
Подведу итог. Если вы используете OSD на микросхеме MAX7456 и у вас при резкой нагрузке пропадает видео на квадрике, то обеспечьте надежное питание микросхеме в 5 вольт и следите за тем, чтобы напряжение не опускалось ниже порогового значения в 4.75 вольта. Вот и все, удачных полетов!
26 декабря 2016
RunCam3 - анонс камеры форм-фактора GoPro Session
Экшен-камера GoPro Session - несомненный лидер для съемки с борта гоночного квадрика. Ударопрочный корпус, удобный форм-фактор, отличный звук, бесподобное видео. Но... есть одно но - это космическая цена! Я все ждал, когда же появятся камеры других производителей в таком же форм-факторе. И вот дождался! Компания RunCan анонсировала камеру RunCam3 HD!

Производитель обещает появление камеры RunCam3 HD в начале 2017-го года. Размеры камеры будут такими же, как у GoPro Session. Камера будет совместима со всеми аксессуарами для GoPro Session. Корпус камеры будет покрыт эластичным прорезиненным материалом, так что для ее установки на квадрик не потребуется дополнительный защитный каркас. Камера RunCam3 HD будет легче GoPro Session. Разработчики делают основной упор на создание ударопрочной камеры именно для FPV-полетов. Звук обещают с фильтрацией шума ветра. Видео будет честным 1080p/60FPS, без интерполяции и повтора кадров. Время записи от одного заряда аккумулятора предполагается больше часа!
Хорошее начало 2017-го! Может и другие производители подтянутся:)
Производитель обещает появление камеры RunCam3 HD в начале 2017-го года. Размеры камеры будут такими же, как у GoPro Session. Камера будет совместима со всеми аксессуарами для GoPro Session. Корпус камеры будет покрыт эластичным прорезиненным материалом, так что для ее установки на квадрик не потребуется дополнительный защитный каркас. Камера RunCam3 HD будет легче GoPro Session. Разработчики делают основной упор на создание ударопрочной камеры именно для FPV-полетов. Звук обещают с фильтрацией шума ветра. Видео будет честным 1080p/60FPS, без интерполяции и повтора кадров. Время записи от одного заряда аккумулятора предполагается больше часа!
Хорошее начало 2017-го! Может и другие производители подтянутся:)
25 декабря 2016
Heli-X-6.1 - новая версия отличного вертолетного симулятора
Недавно великолепный вертолетный симулятор Heli-X обновился до версии 6.1. Изменений немного, в основном были исправления.

Из того, что удалось найти - это дополнительная опция "Из стороны в сторону" в режиме тренировки зависания.

Если включить эту опцию и передать управление руддером компьютеру, то вертолет будет медленно поворачиваться из стороны в сторону. Такая тренировка полезна, чтобы не привыкать к повороту модели только в одну сторону.
Скачать обновления можно по ссылке. Новые модели вертолетов обещают немного позже. Симулятор по прежнему работает во всех основных операционных системах.
Из того, что удалось найти - это дополнительная опция "Из стороны в сторону" в режиме тренировки зависания.
Если включить эту опцию и передать управление руддером компьютеру, то вертолет будет медленно поворачиваться из стороны в сторону. Такая тренировка полезна, чтобы не привыкать к повороту модели только в одну сторону.
Скачать обновления можно по ссылке. Новые модели вертолетов обещают немного позже. Симулятор по прежнему работает во всех основных операционных системах.
24 декабря 2016
Гонки по FPV - сборка запасного квадрика
С этими соревнованиями совершенно забросил все дела. Две недели просто улетели. Все, пора приступать к сборке квадриков себе и другу, благо почти все запасные части наконец-то приехали. Начало процесса можно посмотреть здесь и здесь. Заказал и себе передатчик переключаемой мощности Eachine ET526 и PDB RealAcc HUBOSD, чтобы уж совсем были квадрики одинаковые.

Первым делом решил разобраться с прошивкой PDB RealAcc HUBOSD. Делал все по инструкции с сайта stosd.com. Скачал программу для прошивки STOSD8_Tool. Как сказано в инструкции, подключил три проводка к FTDI-адаптеру, дал питание на плату PDB и запустил программу. В самой программе ничего сложного. Проверил обновление, соединился с платой, залил последнюю прошивку версии 3.3 и все. Настроек самый минимум. Разве что откалибровал показания напряжения.
Припаял силовой разъем XT60 к плате PDB RealAcc HUBOSD. Потребовался мощный 40-ваттный паяльник. Снизу к раме, в месте установки аккумулятора, наклеил липучку длиной 80мм. Сразу же просунул в раму ремешок для фиксации аккумулятора. Кстати, ремешок из комплекта длиной 20 сантиметров коротковат для фиксации четырех-баночного аккумулятора. Заменил его на прорезиненный ремешок от BangGood длиной 22см.

Установил плату PDB RealAcc HUBOSD на короткие пластиковые стоечки, которые были с ней в комплекте. Пластиковые винтики из комплекта платы PDB не подошли - коротковаты. Пришлось искать винтики M3x8.

К плате PDB на шину питания сразу же установил конденсатор 1000мкФ/25В. Можно было и на 820мкФ установить. Как показала практика, такие конденсаторы отлично помогают от неожиданного пропадания видео в полете из-за неустойчивой работы OSD, да и просто от помех на видео.
Перед установкой моторов RacerStar BR2205 2300kV на раму, заклеил у них скотчем нижнюю часть. Если произойдет авария и из мотора вырвет ротор, что уже случалось, то стопорное кольцо не потеряется. Можно будет прямо в поле быстро снять и восстановить мотор.

Подготовил регуляторы RacerStar RS30A V2 для установки. Сначала снял с них термоусадку, чтобы потом покрыть лаком "Пластик 71" для защиты от влаги.

Силовые провода укоротил до 40мм, кончики зачистил и залудил. Так же залудил площадки для проводов от моторов. Уже когда сделал снимок, то заметил, что на нижнем регуляторе сигнальный провод спаян с общим! Хорошо, что заметил - исправил.

Решил сразу же подготовить регуляторы для работы с новым цифровым протоколом DSHOT-600. Как написано в документации, для этого необходимо удалить фильтрующий конденсатор. Оно хоть и не очень нужно, на DSHOT-300 будет и с ним работать, но уж раз есть возможность сделать по максимуму, пусть будет по максимуму.
Установил моторы RacerStar BR2205-2300kV на раму с учетом направления вращения. Передний левый и задний правый - по часовой стрелке, передний правый и задний левый - против часовой. Для защиты моторов поставил KingKong Motor Cover. Моторы закрепил винтиками M3x8 из комплекта защиты.

Провода моторов обрезал до 20-21мм, средний покороче, боковые подлиннее. Выводы зачистил и залудил.
Припаял регуляторы к моторам. Причем на моторах с вращением против часовой стрелки два проводка сделал крест-накрест, чтобы не менять направление вращения моторов в настройках регуляторов. Очистил спиртом остатки канифоли и покрыл регуляторы с обоих сторон лаком "Пластик 71". Когда лак высох, регуляторы снова упаковал в термоусадку. Под регуляторы подклеил полоски толстого двухстороннего скотча для фиксации на лучах. Позже еще и изолентой примотаю.

Припаял силовые провода от регуляторов к плате распределения питания. Пришлось использовать мощный паяльник на 40 ватт, иначе не получалось прогреть место пайки. Как-то не правильно на плате пятачки для силовых проводов расположены - местами перепутаны:) Пришлось бы либо регуляторы силовыми ключами к раме разворачивать, либо провода крест-накрест делать. Я выбрал второе, хотя оно и менее эстетично.
Решил собрать верхнюю часть рамы и установить передатчик. Но перед этим немного модифицировал передатчик Eachine ET526 - заменил разъем с SMA на RP-SMA, так как у меня все антенны именно под RP-SMA. Для этого вместе с передатчиком был приобретен отдельный RP-SMA разъем, из него извлечен центральный пин и установлен в разъем передатчика.

Раз уж снял с передатчика термоусадку, думал покрыть передатчик лаком "Пластик 71" или нет. Решил не покрывать. На нем еще и микрофон установлен, боюсь лак в него затечет. Просто снова упаковал передатчик в термоусадку.
Когда собрал верхнюю часть рамы из комплекта для друга, то обнаружил, что одна карбоновая деталь явно коротковата.

Площадка для экшен-камеры на одной раме едва держится в пазах, а на другой раме стоит нормально. Хорошо, что эти площадки есть отдельно в продаже - позже заменю. На передатчик Eachine ET526 со стороны радиатора приклеил толстый двухсторонний скотч и притянул к раме стяжками.

Встал он немного не ровно, но вполне надежно. Когда будет установлена антенна, ее тоже нужно стяжкой притянуть к раме, чтобы не вырвало разъем из передатчика при авариях.
Подготовил две камеры Foxeer HS1177 черного и оранжевого цвета. Разобрал и проклеил контакты матрицы термоклеем, так как часто читал, что во время аварий матрицу может оторвать от платы. Надеюсь, термоклей поможет удержать ее на месте.

В сети подсмотрел, что на крышки камер приклеивают кусочки поролона, чтобы плата камеры не вибрировала. Подключил камеры к компьютеру через ТВ-тюнер, а для питания использовал аккумулятор от шлема. Заменил стоковые линзы на линзы типа от GoPro2 и настроил резкость.

Картинка с новыми линзами стала немного шире, но не настолько, чтобы было не комфортно летать. Специально сначала заменил линзу на одной камере и попеременно подключал камеры, чтобы оценить разницу. Резкости и параметры настраивал по этому видео.
Вроде бы уже все подготовлено для полной сборки, но тут вспомнил, что нужно еще и крепление для панельки светодиодов придумать. Быстренько нарисовал в Inkscape подходящий эскиз, распечатал, прилепил на заготовку, вырезал дремелем и довел надфилями. В качестве заготовки использовал заглушку CD-привода от старого компьютерного корпуса.

Крепление светодиодов держится за стойки, а снизу еще немного цепляется и за лучи, так что никуда не сдвинется. Светодиоды подключил на разъеме прямо в порт полетного контроллера SP Racing F3 6DOF. Кстати, сам полетный контроллер пришлось установить вверх ногами из-за того, что в него спереди упиралась камера своим разъемом. Да и выводы получились удачно и в нужном месте. В вырез крепления светодиодов установил на толстый двухсторонний скотч еще и пищалку - ей тут самое место. Стойки снизу закреплены винтиками M3x8.
Прежде чем установить полетный контроллер, вывел все необходимые провода с платы PDB. Полетный контроллер будет питаться от напряжения 5 вольт, вывел провода для этого рядом с силовым разъемом. Рядом с конденсатором сделал отдельный вывод для контроля напряжения аккумулятора, который позже пойдет в разъем VBAT полетного контроллера.

Передатчик будет питаться от напряжения 12 вольт, а камера - от 5 вольт. Так как каналами передатчика можно управлять программно, оставил для этого отдельный провод. После монтажа покрыл плату PDB лаком "Пластик 71" для защиты от влаги. Все, с разводкой видеосигнала и питания компонентов закончено.
На полетных контроллерах залил термоклеем USB-разъем, так как бывали случаи его отрыва во время аварии. На самом деле, просто перестраховался.

В выходам UART3 подпаял разъем приемника, а к контактам VBAT - разъем для передачи напряжения аккумулятора на приемник. Приемник OrangeRX R602X имеет телеметрию и может передавать напряжение аккумулятора на передатчик. Осталось покрыть полетные контроллеры лаком "Пластик 71".
Когда стал примерять всю связку PDB - полетный контроллер - приемник, то понял, что верхнюю часть рамы будет сложно установить. Передатчик упирался в приемник и по высоте не хватало примерно миллиметра. Пришлось снова все разбирать и укорачивать на тот самый миллиметр нижние стоки под PDB. А вместе с ними и болтики. Только тогда удалось все собрать.

К полетному контроллеру подпаял пищалку и сигнальные провода от регуляторов. Управляющий провод от передатчика подпаял к седьмому выходу полетного контроллера. Позже настрою переключение каналов передатчика прямо с пульта.

Приемник установил сверху на толстый двухсторонний скотч. Очень хотел зафиксировать его еще и стяжкой, но монтаж между полетным контроллером и платой PDB такой плотный, что там просто не протиснуться. Наружу остались торчать только два разъема: для камеры и передатчика.
Оставалось только установить верхнюю часть рамы и воткнуть разъемы в камеру и передатчик. Антенны приемника вывел в прорезь в верхней пластине рамы. Там же разместил стяжки, а к ним термоусадкой закрепил парочку трубочек от ватных палочек. В эти трубочки и засунул концы антенн.

Это позволит снимать верхнюю часть рамы без проблем. Все детали там на разъемах, а антенны жестко не зафиксированы.
Очень не понравилось крепление камеры. На двух винтиках еле держится. Надо придумать какое-то крепление за объектив. Так же сама камера никак не защищена от ударов.

На фотографии видно, что разъем камеры упирается в край полетного контроллера. Надо выбирать камеру с верхним расположением разъема, но продавались только с нижним, так что пришлось брать что есть.
Все готово! Сухой вес 340 грамм. Жаль, что второй квадрик-близнец еще не готов - ожидаемые запчасти застряли на выходе из таможни.

Первым делом проверил видео... и не обнаружил его. Перетряхнул все провода, проверил разъемы - ничего. Уже хотел снова все разбирать, но вспомнил, что у передатчика Eachine ET526 есть режим отключения видео-передачи. Проверил - точно! Передатчик просто ничего не передавал! Оно конечно хорошо, когда включаешь квадрик и рядом кто-то летает, то ему помех не будет. Но очень неудобно при каждом включении с трудом подлезать пальцем и включать передатчик. В общем, я немного обескуражен...
Установил в браузере Chrome конфигуратор BLHeli и через него обновил прошивку на регуляторах RacerStar RS30A V2. Поставил последнюю на текущий момент прошивку 16.53 с поддержкой цифрового протокола DSHOT.

Затем обновил прошивку в полетном контроллере через конфигуратор BetaFlight. Пока что прошивка с поддержкой цифрового протокола DSHOT находится в стадии тестирования, так что брать ее нужно здесь.

Про настройку DSHOT в прошивке BetaFlight читать здесь. Минимальные обороты настраиваются через консоль параметром digital_idle_percent. Например так:
set digital_idle_percent = 4.000
Для управления каналами передатчика Eachine ET526 подключил провод PWM к седьмому выходу полетного контроллера. В настройках включить опции SERVO_TILT и CHANNEL_FORWARDING. Именно они необходимы, чтобы иметь возможность вывести отдельный канал с приемника, подключенного через шину S.BUS, на выход полетного контроллера.

После этого можно назначить вывод сигнала с какого-либо из AUX-каналов приемника на выход полетного контроллера в разделе Servos. Я назначил на первый вывод для сервоприводов канал AUX5.

В прошивке BetaFlight выводы под сервоприводы начинаются с седьмого выхода. Не знаю почему так, но седьмой вывод соответствует данным из строки Servo0, восьмой - Servo1 и так далее.
На прошивке BetaFlight версии 3.0.1 переключение каналов передатчика Eachine ET526 прекрасно работало, а на бета-версии с поддержкой DSHOT пока что не работает. Как говорится, ждем релиза:)
Про остальные настройки прошивки BetaFlight можно еще очень долго рассказывать, но это тема больше подходит для отдельной статьи. Так что просто приведу здесь текущие настройки. Пока еще не настроены PID-ы, расходы и экспоненты. Это все можно настроить во время полетов с помощью приложения для телефона PIDFlight. Модель для передатчика DEVO-10 так же прилагаю, может кому пригодится.
Пропеллеры KingKong 5x4x3 из комплекта как нельзя кстати подходят для моторов RacerStar BR2205 2300kV. Ну может быть еще новые DALPROP T5045C Cyclone подойдут. Моторы не очень мощные, нужны легкие пропеллеры, чтобы квадрик динамично реагировал на изменения газа.
Первый облет состоялся визуально в комнате. Была проверка работоспособности всех систем. Никаких проблем пока выявлено не было. Только что не попробовал полет в режиме стабилизации. Побоялся, что не справлюсь с управлением, летал только в акро-режиме.
Следующий полет был уже на улице. Как раз и с погодой повезло. Ветра не было и было тепло.
Во время испытаний выявилась одна неприятная проблема - пропадает видео. Причем остается черный экран. Если бы пропадало из-за связи передатчика с приемником, то на экране был бы снег. Если бы просто отключалась камера, то был бы черный экран с данными OSD. А если остается просто черный экран, значит видео пропадает на выходе с OSD перед поступлением в передатчик. Стал думать, почему такое может происходить. Перед этим собирал квадрик так же с HUBOSD и там никаких проблем с видео не было. Напряжение на выходе BEC на плате PDB было 5.13 вольт. Но и подключены туда были только светодиоды и камера. Полетный контроллер имел свой BEC на 5 вольт, от которого питался и приемник.
В данной конфигурации на BEC 5 вольт подключены светодиоды, полетный контроллер, камера и приемник. Напряжение на выходе получается 4.85 вольта. При резкой подаче газа напряжение просаживается еще чуть ниже, что видно по показаниям телеметрии, приходящей на пульт. Микросхема OSD, кстати очень чувствительная к просадкам напряжения ниже пяти вольт, просто отключается. Но я не думаю, что это из-за слабого BEC на 5 вольт. Он импульсный, построен на стабилизаторе MP2315, способен выдерживать ток до 3А. Вряд ли вся связка потребляет больше. Скорее всего, причина в изначально низком напряжении на шине 5 вольт, которое слегка просаживается при нагрузке. Стабилизатор напряжения регулируемый. Если нормально подобрать регулирующее сопротивление, то проблема исчезнет. Осталось найти по разводке это самое регулирующее сопротивление:) Частично может решить проблему установка большого конденсатора на шину 5 вольт. Но, на мой взгляд, это костыль, так как при длительной нагрузке емкости конденсатора все равно не хватит на поддержание напряжения на достаточном уровне. В конце силового маневра может случиться неожиданный сюрприз с пропаданием видео:) Ладно, буду разбираться...
Запчасти для брата-близнеца этого квадрика через пару дней уже будут у меня. Все готово для его быстрой сборки. Если бы я продолжил сборку, используя плату Matek PBD, то мог бы получить те же самые проблемы с пропаданием видео.
Общий вывод по комплекту - вполне годный, рабочий. Подходит для повседневного использования. Комплектующие недорогие и всегда есть в продаже. Регуляторы RacerStar RS30A V2, после небольшой модификации, прекрасно работают с новым цифровым протоколом DSHOT-600. Моторы RacerStar BR2205 2300kV стоят совсем недорого и заменить их не будет проблемой, если повредятся. Квадрик получился очень послушный в управлении. Даже новичок с ним легко справится. На этом все, удачных полетов!

Первым делом решил разобраться с прошивкой PDB RealAcc HUBOSD. Делал все по инструкции с сайта stosd.com. Скачал программу для прошивки STOSD8_Tool. Как сказано в инструкции, подключил три проводка к FTDI-адаптеру, дал питание на плату PDB и запустил программу. В самой программе ничего сложного. Проверил обновление, соединился с платой, залил последнюю прошивку версии 3.3 и все. Настроек самый минимум. Разве что откалибровал показания напряжения.
Припаял силовой разъем XT60 к плате PDB RealAcc HUBOSD. Потребовался мощный 40-ваттный паяльник. Снизу к раме, в месте установки аккумулятора, наклеил липучку длиной 80мм. Сразу же просунул в раму ремешок для фиксации аккумулятора. Кстати, ремешок из комплекта длиной 20 сантиметров коротковат для фиксации четырех-баночного аккумулятора. Заменил его на прорезиненный ремешок от BangGood длиной 22см.

Установил плату PDB RealAcc HUBOSD на короткие пластиковые стоечки, которые были с ней в комплекте. Пластиковые винтики из комплекта платы PDB не подошли - коротковаты. Пришлось искать винтики M3x8.

К плате PDB на шину питания сразу же установил конденсатор 1000мкФ/25В. Можно было и на 820мкФ установить. Как показала практика, такие конденсаторы отлично помогают от неожиданного пропадания видео в полете из-за неустойчивой работы OSD, да и просто от помех на видео.
Перед установкой моторов RacerStar BR2205 2300kV на раму, заклеил у них скотчем нижнюю часть. Если произойдет авария и из мотора вырвет ротор, что уже случалось, то стопорное кольцо не потеряется. Можно будет прямо в поле быстро снять и восстановить мотор.

Подготовил регуляторы RacerStar RS30A V2 для установки. Сначала снял с них термоусадку, чтобы потом покрыть лаком "Пластик 71" для защиты от влаги.

Силовые провода укоротил до 40мм, кончики зачистил и залудил. Так же залудил площадки для проводов от моторов. Уже когда сделал снимок, то заметил, что на нижнем регуляторе сигнальный провод спаян с общим! Хорошо, что заметил - исправил.

Решил сразу же подготовить регуляторы для работы с новым цифровым протоколом DSHOT-600. Как написано в документации, для этого необходимо удалить фильтрующий конденсатор. Оно хоть и не очень нужно, на DSHOT-300 будет и с ним работать, но уж раз есть возможность сделать по максимуму, пусть будет по максимуму.
Установил моторы RacerStar BR2205-2300kV на раму с учетом направления вращения. Передний левый и задний правый - по часовой стрелке, передний правый и задний левый - против часовой. Для защиты моторов поставил KingKong Motor Cover. Моторы закрепил винтиками M3x8 из комплекта защиты.

Провода моторов обрезал до 20-21мм, средний покороче, боковые подлиннее. Выводы зачистил и залудил.
Припаял регуляторы к моторам. Причем на моторах с вращением против часовой стрелки два проводка сделал крест-накрест, чтобы не менять направление вращения моторов в настройках регуляторов. Очистил спиртом остатки канифоли и покрыл регуляторы с обоих сторон лаком "Пластик 71". Когда лак высох, регуляторы снова упаковал в термоусадку. Под регуляторы подклеил полоски толстого двухстороннего скотча для фиксации на лучах. Позже еще и изолентой примотаю.

Припаял силовые провода от регуляторов к плате распределения питания. Пришлось использовать мощный паяльник на 40 ватт, иначе не получалось прогреть место пайки. Как-то не правильно на плате пятачки для силовых проводов расположены - местами перепутаны:) Пришлось бы либо регуляторы силовыми ключами к раме разворачивать, либо провода крест-накрест делать. Я выбрал второе, хотя оно и менее эстетично.
Решил собрать верхнюю часть рамы и установить передатчик. Но перед этим немного модифицировал передатчик Eachine ET526 - заменил разъем с SMA на RP-SMA, так как у меня все антенны именно под RP-SMA. Для этого вместе с передатчиком был приобретен отдельный RP-SMA разъем, из него извлечен центральный пин и установлен в разъем передатчика.

Раз уж снял с передатчика термоусадку, думал покрыть передатчик лаком "Пластик 71" или нет. Решил не покрывать. На нем еще и микрофон установлен, боюсь лак в него затечет. Просто снова упаковал передатчик в термоусадку.
Когда собрал верхнюю часть рамы из комплекта для друга, то обнаружил, что одна карбоновая деталь явно коротковата.
Площадка для экшен-камеры на одной раме едва держится в пазах, а на другой раме стоит нормально. Хорошо, что эти площадки есть отдельно в продаже - позже заменю. На передатчик Eachine ET526 со стороны радиатора приклеил толстый двухсторонний скотч и притянул к раме стяжками.
Встал он немного не ровно, но вполне надежно. Когда будет установлена антенна, ее тоже нужно стяжкой притянуть к раме, чтобы не вырвало разъем из передатчика при авариях.
Подготовил две камеры Foxeer HS1177 черного и оранжевого цвета. Разобрал и проклеил контакты матрицы термоклеем, так как часто читал, что во время аварий матрицу может оторвать от платы. Надеюсь, термоклей поможет удержать ее на месте.
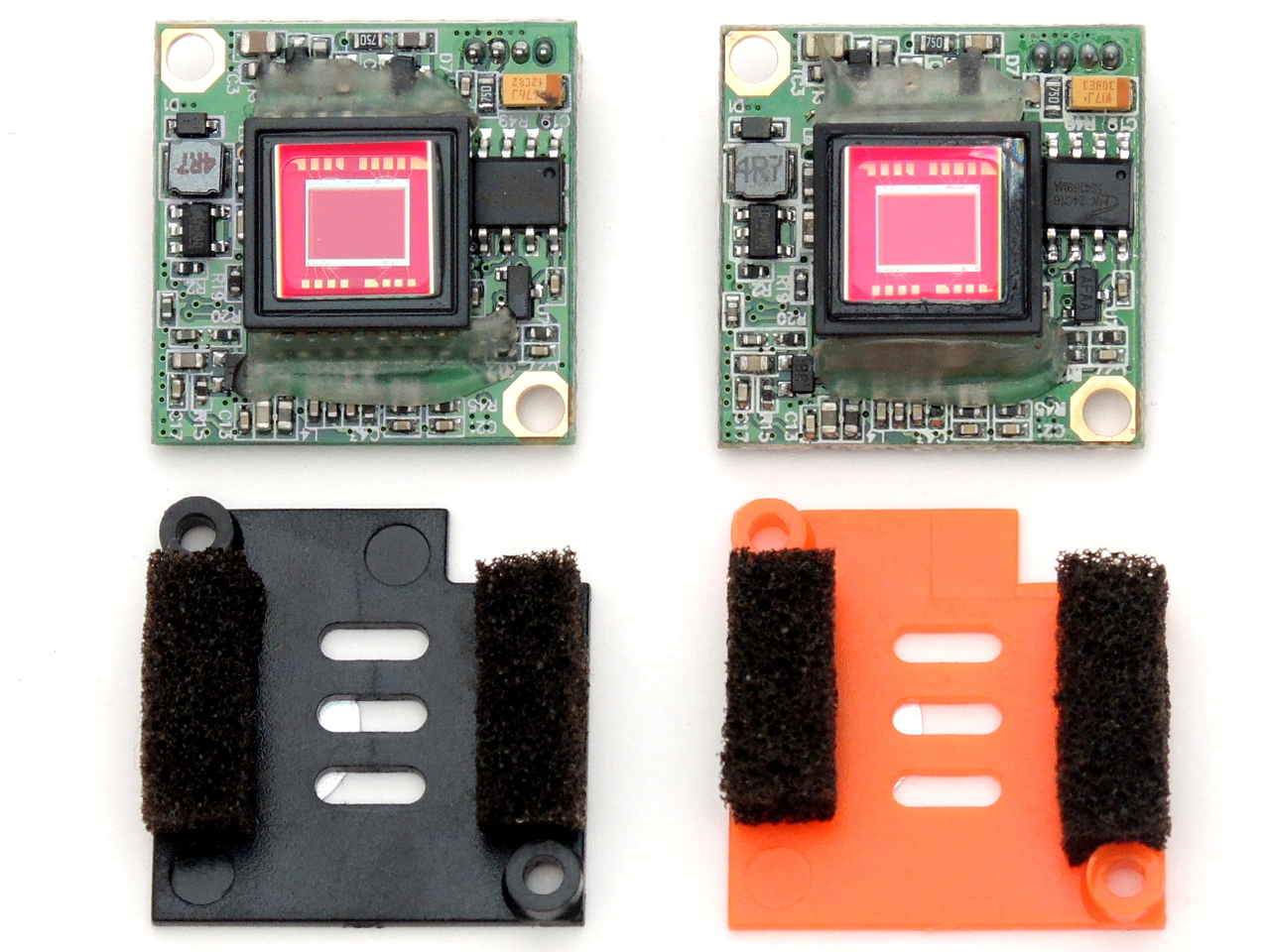
В сети подсмотрел, что на крышки камер приклеивают кусочки поролона, чтобы плата камеры не вибрировала. Подключил камеры к компьютеру через ТВ-тюнер, а для питания использовал аккумулятор от шлема. Заменил стоковые линзы на линзы типа от GoPro2 и настроил резкость.

Картинка с новыми линзами стала немного шире, но не настолько, чтобы было не комфортно летать. Специально сначала заменил линзу на одной камере и попеременно подключал камеры, чтобы оценить разницу. Резкости и параметры настраивал по этому видео.
Вроде бы уже все подготовлено для полной сборки, но тут вспомнил, что нужно еще и крепление для панельки светодиодов придумать. Быстренько нарисовал в Inkscape подходящий эскиз, распечатал, прилепил на заготовку, вырезал дремелем и довел надфилями. В качестве заготовки использовал заглушку CD-привода от старого компьютерного корпуса.

Крепление светодиодов держится за стойки, а снизу еще немного цепляется и за лучи, так что никуда не сдвинется. Светодиоды подключил на разъеме прямо в порт полетного контроллера SP Racing F3 6DOF. Кстати, сам полетный контроллер пришлось установить вверх ногами из-за того, что в него спереди упиралась камера своим разъемом. Да и выводы получились удачно и в нужном месте. В вырез крепления светодиодов установил на толстый двухсторонний скотч еще и пищалку - ей тут самое место. Стойки снизу закреплены винтиками M3x8.
Прежде чем установить полетный контроллер, вывел все необходимые провода с платы PDB. Полетный контроллер будет питаться от напряжения 5 вольт, вывел провода для этого рядом с силовым разъемом. Рядом с конденсатором сделал отдельный вывод для контроля напряжения аккумулятора, который позже пойдет в разъем VBAT полетного контроллера.

Передатчик будет питаться от напряжения 12 вольт, а камера - от 5 вольт. Так как каналами передатчика можно управлять программно, оставил для этого отдельный провод. После монтажа покрыл плату PDB лаком "Пластик 71" для защиты от влаги. Все, с разводкой видеосигнала и питания компонентов закончено.
На полетных контроллерах залил термоклеем USB-разъем, так как бывали случаи его отрыва во время аварии. На самом деле, просто перестраховался.

В выходам UART3 подпаял разъем приемника, а к контактам VBAT - разъем для передачи напряжения аккумулятора на приемник. Приемник OrangeRX R602X имеет телеметрию и может передавать напряжение аккумулятора на передатчик. Осталось покрыть полетные контроллеры лаком "Пластик 71".
Когда стал примерять всю связку PDB - полетный контроллер - приемник, то понял, что верхнюю часть рамы будет сложно установить. Передатчик упирался в приемник и по высоте не хватало примерно миллиметра. Пришлось снова все разбирать и укорачивать на тот самый миллиметр нижние стоки под PDB. А вместе с ними и болтики. Только тогда удалось все собрать.

К полетному контроллеру подпаял пищалку и сигнальные провода от регуляторов. Управляющий провод от передатчика подпаял к седьмому выходу полетного контроллера. Позже настрою переключение каналов передатчика прямо с пульта.

Приемник установил сверху на толстый двухсторонний скотч. Очень хотел зафиксировать его еще и стяжкой, но монтаж между полетным контроллером и платой PDB такой плотный, что там просто не протиснуться. Наружу остались торчать только два разъема: для камеры и передатчика.
Оставалось только установить верхнюю часть рамы и воткнуть разъемы в камеру и передатчик. Антенны приемника вывел в прорезь в верхней пластине рамы. Там же разместил стяжки, а к ним термоусадкой закрепил парочку трубочек от ватных палочек. В эти трубочки и засунул концы антенн.

Это позволит снимать верхнюю часть рамы без проблем. Все детали там на разъемах, а антенны жестко не зафиксированы.
Очень не понравилось крепление камеры. На двух винтиках еле держится. Надо придумать какое-то крепление за объектив. Так же сама камера никак не защищена от ударов.

На фотографии видно, что разъем камеры упирается в край полетного контроллера. Надо выбирать камеру с верхним расположением разъема, но продавались только с нижним, так что пришлось брать что есть.
Все готово! Сухой вес 340 грамм. Жаль, что второй квадрик-близнец еще не готов - ожидаемые запчасти застряли на выходе из таможни.

Первым делом проверил видео... и не обнаружил его. Перетряхнул все провода, проверил разъемы - ничего. Уже хотел снова все разбирать, но вспомнил, что у передатчика Eachine ET526 есть режим отключения видео-передачи. Проверил - точно! Передатчик просто ничего не передавал! Оно конечно хорошо, когда включаешь квадрик и рядом кто-то летает, то ему помех не будет. Но очень неудобно при каждом включении с трудом подлезать пальцем и включать передатчик. В общем, я немного обескуражен...
Установил в браузере Chrome конфигуратор BLHeli и через него обновил прошивку на регуляторах RacerStar RS30A V2. Поставил последнюю на текущий момент прошивку 16.53 с поддержкой цифрового протокола DSHOT.

Затем обновил прошивку в полетном контроллере через конфигуратор BetaFlight. Пока что прошивка с поддержкой цифрового протокола DSHOT находится в стадии тестирования, так что брать ее нужно здесь.

Про настройку DSHOT в прошивке BetaFlight читать здесь. Минимальные обороты настраиваются через консоль параметром digital_idle_percent. Например так:
set digital_idle_percent = 4.000
Для управления каналами передатчика Eachine ET526 подключил провод PWM к седьмому выходу полетного контроллера. В настройках включить опции SERVO_TILT и CHANNEL_FORWARDING. Именно они необходимы, чтобы иметь возможность вывести отдельный канал с приемника, подключенного через шину S.BUS, на выход полетного контроллера.
После этого можно назначить вывод сигнала с какого-либо из AUX-каналов приемника на выход полетного контроллера в разделе Servos. Я назначил на первый вывод для сервоприводов канал AUX5.

В прошивке BetaFlight выводы под сервоприводы начинаются с седьмого выхода. Не знаю почему так, но седьмой вывод соответствует данным из строки Servo0, восьмой - Servo1 и так далее.
На прошивке BetaFlight версии 3.0.1 переключение каналов передатчика Eachine ET526 прекрасно работало, а на бета-версии с поддержкой DSHOT пока что не работает. Как говорится, ждем релиза:)
Про остальные настройки прошивки BetaFlight можно еще очень долго рассказывать, но это тема больше подходит для отдельной статьи. Так что просто приведу здесь текущие настройки. Пока еще не настроены PID-ы, расходы и экспоненты. Это все можно настроить во время полетов с помощью приложения для телефона PIDFlight. Модель для передатчика DEVO-10 так же прилагаю, может кому пригодится.
Пропеллеры KingKong 5x4x3 из комплекта как нельзя кстати подходят для моторов RacerStar BR2205 2300kV. Ну может быть еще новые DALPROP T5045C Cyclone подойдут. Моторы не очень мощные, нужны легкие пропеллеры, чтобы квадрик динамично реагировал на изменения газа.
Первый облет состоялся визуально в комнате. Была проверка работоспособности всех систем. Никаких проблем пока выявлено не было. Только что не попробовал полет в режиме стабилизации. Побоялся, что не справлюсь с управлением, летал только в акро-режиме.
Следующий полет был уже на улице. Как раз и с погодой повезло. Ветра не было и было тепло.
Во время испытаний выявилась одна неприятная проблема - пропадает видео. Причем остается черный экран. Если бы пропадало из-за связи передатчика с приемником, то на экране был бы снег. Если бы просто отключалась камера, то был бы черный экран с данными OSD. А если остается просто черный экран, значит видео пропадает на выходе с OSD перед поступлением в передатчик. Стал думать, почему такое может происходить. Перед этим собирал квадрик так же с HUBOSD и там никаких проблем с видео не было. Напряжение на выходе BEC на плате PDB было 5.13 вольт. Но и подключены туда были только светодиоды и камера. Полетный контроллер имел свой BEC на 5 вольт, от которого питался и приемник.
В данной конфигурации на BEC 5 вольт подключены светодиоды, полетный контроллер, камера и приемник. Напряжение на выходе получается 4.85 вольта. При резкой подаче газа напряжение просаживается еще чуть ниже, что видно по показаниям телеметрии, приходящей на пульт. Микросхема OSD, кстати очень чувствительная к просадкам напряжения ниже пяти вольт, просто отключается. Но я не думаю, что это из-за слабого BEC на 5 вольт. Он импульсный, построен на стабилизаторе MP2315, способен выдерживать ток до 3А. Вряд ли вся связка потребляет больше. Скорее всего, причина в изначально низком напряжении на шине 5 вольт, которое слегка просаживается при нагрузке. Стабилизатор напряжения регулируемый. Если нормально подобрать регулирующее сопротивление, то проблема исчезнет. Осталось найти по разводке это самое регулирующее сопротивление:) Частично может решить проблему установка большого конденсатора на шину 5 вольт. Но, на мой взгляд, это костыль, так как при длительной нагрузке емкости конденсатора все равно не хватит на поддержание напряжения на достаточном уровне. В конце силового маневра может случиться неожиданный сюрприз с пропаданием видео:) Ладно, буду разбираться...
Запчасти для брата-близнеца этого квадрика через пару дней уже будут у меня. Все готово для его быстрой сборки. Если бы я продолжил сборку, используя плату Matek PBD, то мог бы получить те же самые проблемы с пропаданием видео.
Общий вывод по комплекту - вполне годный, рабочий. Подходит для повседневного использования. Комплектующие недорогие и всегда есть в продаже. Регуляторы RacerStar RS30A V2, после небольшой модификации, прекрасно работают с новым цифровым протоколом DSHOT-600. Моторы RacerStar BR2205 2300kV стоят совсем недорого и заменить их не будет проблемой, если повредятся. Квадрик получился очень послушный в управлении. Даже новичок с ним легко справится. На этом все, удачных полетов!
23 декабря 2016
iSDT SC-608 - компактное и мощное зарядное устройство
Сегодня коллега получил очередную посылку с BangGood с новым зарядным устройством iSDT SC-608. Посмотрел на него и предложил мне сделать небольшой обзор. А я и не отказался:)

Краткие характеристики зарядного устройства iSDT SC-608:

Внутри, кроме зарядного устройства и краткой инструкции на английском языке, больше ничего не было. Даже никаких проводов.

На лицевой стороне расположен цветной экран размером 2.4 дюйма и разрешением 320x240 пикселей. Экран прикрыт прозрачной панелью, очень маркой и совершенно не стойкой к царапинам. Сразу же рекомендую докупить защитную пленку.

Все управление зарядным устройством iSDT SC-608 состоит из колесика, расположенного на правой стороне, которое может еще и нажиматься. Здесь же виден миниджек для подключения USB-свистка, который требуется для обновления прошивки.

С левой стороны расположен разъем TX-60 и балансировочный разъем для подключения аккумулятора.

Поддерживаются аккумуляторы только до шести банок. Для такого маленького зарядного устройства больше и не нужно.

На задней стенке есть отверстия для охлаждения и разъем XT-60 для подключения источника питания. Можно подключать источник с любым напряжением в диапазоне от 9 до 32 вольт. Кстати, разъем питания сделан так, чтобы можно было подключать аккумуляторы большой емкости и использовать их для зарядки аккумулятором емкостью поменьше. Очень удобное решение. Можно купить 3-4 силовых аккумулятора с большой токоотдачей и один большой емкости с малой токоотдачей, от которого заряжать в поле силовые аккумуляторы. Это будет заметно дешевле, чем покупать большое количество дорогих аккумуляторов с большой токоотдачей. А большой аккумулятор можно даже собрать самому на элементах 18650.

Снизу, сквозь решетку, просвечивает вентилятор. Кстати, он не очень сильно шумит и не на высоком тоне. Не раздражает. Включается только когда нужно, а потом отключается.
С экстерьером закончил, теперь по функционалу. Первым делом залез в настройки. Это можно сделать, если нажать и подержать колесико, когда зарядное устройство находится в режиме ожидания.

Пунктом "max Input Power" можно задать максимальную входную мощность. Очень удобно, если используется не очень мощный источник питания или надо ограничить ток разряда питающего аккумулятора. Пункт "Min Input Voltage" служит для задания минимального входного напряжения. Если используется питающий аккумулятор, то этим значением можно ограничить напряжение, чтобы не допустить переразряда аккумулятора. Следующие три пункта - это яркость экрана, громкость звуковых сигналов и выбор языка. Увы, русского нет. Пункт "Firmware Share" служит для обновления прошивки в зарядном устройстве. Если промотать колесиком страницу вниз, то есть еще пункт "OS Info". Это информация о прошивке зарядного устройства.

Еще чуть ниже есть пункт "Self-testing" - это самопроверка функционирования зарядного устройства.
После подключения аккумулятора сразу же отображается общий вольтаж и напряжение по банкам.

Если нажать колесико, то попадаешь в меню действий. Есть режим зарядки, разрядки и подготовки для хранения. Затем указывается тип аккумулятора, количество банок и ток для текущей операции. Пункт "Start" в переводе не нуждается:)

Во время операции зарядки на экране отображается время, процент заряда, текущий ток заряда, количество миллиампер в час, напряжение по банкам. Если промотать колесиком страницу ниже, то там будет еще внутреннее сопротивление по банкам и температура внутри зарядного устройства.

Во время зарядки корпус практически не греется, едва теплый. Когда зарядное устройство коротко пикнет, значит завершен режим быстрой зарядки. В общем, заряженный аккумулятор уже можно использовать.

Но если необходимо поточнее отбалансировать банки, то стоит подождать еще немного, до полной зарядки аккумулятора.

Перевод аккумулятора в режим хранения - очень длительная процедура. Зарядное устройство iSDT SC-608 разряжает аккумулятор током всего 0.3 ампера! Так что имеет смысл переводить в режим хранения только разряженные аккумуляторы.

Я честно прождал несколько часов, но так и не дождался завершения процедуры перевода аккумулятора в режим хранения:)
Поделюсь своими впечатлениями от зарядного устройства iSDT SC-608. К плюсам отнесу компактность, умещается на ладони. Так же малый вес, очень быструю балансировку, поддержку довольно большого тока заряда, тихий вентилятор охлаждения. К минусам отнесу маркую и быстро покрывающуюся царапинами лицевую панель, низкий ток разряда, отсутствие в комплекте кабеля для обновления прошивки. Хотя последнее исправили, выпустив по той же цене зарядное устройство iSDT SC-608 в комплекте с кабелем.
Если у вас нет блока питания, то в продаже есть супер-навороченный блок питания iSDT CP-16027 160W 27V как раз для этой зарядки.

Он стоит даже дороже самой зарядки! Но зато имеет всевозможные защиты на все случае жизни. По мне, так и блок питания от старого ноутбука неплохо справляется:)

Краткие характеристики зарядного устройства iSDT SC-608:
- Входное напряжение: 9-32 вольт.
- Выходное напряжение: 0-30 вольт.
- Ток зарядки: 0.1-8.0 ампер.
- Ток разрядки: 0.1-3.0 ампер.
- Максимальная мощность при зарядке: 150 ватт.
- Максимальная мощность при разрядке: 5 ватт.
- Ток балансировки: 0.5 ампер.
- Балансировка: 2-6 банок.
- Поддерживаемые аккумуляторы: LiFe, LiIon, LiPo, LiHV, NiMH, Cd, Pb.
- Экран: 2.4 дюйма 320x240 точек.
- Температура хранения: -20...+60 градусов.
- Размеры: 88x58x21мм.
- Вес: 110 грамм.

Внутри, кроме зарядного устройства и краткой инструкции на английском языке, больше ничего не было. Даже никаких проводов.

На лицевой стороне расположен цветной экран размером 2.4 дюйма и разрешением 320x240 пикселей. Экран прикрыт прозрачной панелью, очень маркой и совершенно не стойкой к царапинам. Сразу же рекомендую докупить защитную пленку.

Все управление зарядным устройством iSDT SC-608 состоит из колесика, расположенного на правой стороне, которое может еще и нажиматься. Здесь же виден миниджек для подключения USB-свистка, который требуется для обновления прошивки.

С левой стороны расположен разъем TX-60 и балансировочный разъем для подключения аккумулятора.

Поддерживаются аккумуляторы только до шести банок. Для такого маленького зарядного устройства больше и не нужно.

На задней стенке есть отверстия для охлаждения и разъем XT-60 для подключения источника питания. Можно подключать источник с любым напряжением в диапазоне от 9 до 32 вольт. Кстати, разъем питания сделан так, чтобы можно было подключать аккумуляторы большой емкости и использовать их для зарядки аккумулятором емкостью поменьше. Очень удобное решение. Можно купить 3-4 силовых аккумулятора с большой токоотдачей и один большой емкости с малой токоотдачей, от которого заряжать в поле силовые аккумуляторы. Это будет заметно дешевле, чем покупать большое количество дорогих аккумуляторов с большой токоотдачей. А большой аккумулятор можно даже собрать самому на элементах 18650.

Снизу, сквозь решетку, просвечивает вентилятор. Кстати, он не очень сильно шумит и не на высоком тоне. Не раздражает. Включается только когда нужно, а потом отключается.
С экстерьером закончил, теперь по функционалу. Первым делом залез в настройки. Это можно сделать, если нажать и подержать колесико, когда зарядное устройство находится в режиме ожидания.

Пунктом "max Input Power" можно задать максимальную входную мощность. Очень удобно, если используется не очень мощный источник питания или надо ограничить ток разряда питающего аккумулятора. Пункт "Min Input Voltage" служит для задания минимального входного напряжения. Если используется питающий аккумулятор, то этим значением можно ограничить напряжение, чтобы не допустить переразряда аккумулятора. Следующие три пункта - это яркость экрана, громкость звуковых сигналов и выбор языка. Увы, русского нет. Пункт "Firmware Share" служит для обновления прошивки в зарядном устройстве. Если промотать колесиком страницу вниз, то есть еще пункт "OS Info". Это информация о прошивке зарядного устройства.

Еще чуть ниже есть пункт "Self-testing" - это самопроверка функционирования зарядного устройства.
После подключения аккумулятора сразу же отображается общий вольтаж и напряжение по банкам.

Если нажать колесико, то попадаешь в меню действий. Есть режим зарядки, разрядки и подготовки для хранения. Затем указывается тип аккумулятора, количество банок и ток для текущей операции. Пункт "Start" в переводе не нуждается:)

Во время операции зарядки на экране отображается время, процент заряда, текущий ток заряда, количество миллиампер в час, напряжение по банкам. Если промотать колесиком страницу ниже, то там будет еще внутреннее сопротивление по банкам и температура внутри зарядного устройства.

Во время зарядки корпус практически не греется, едва теплый. Когда зарядное устройство коротко пикнет, значит завершен режим быстрой зарядки. В общем, заряженный аккумулятор уже можно использовать.

Но если необходимо поточнее отбалансировать банки, то стоит подождать еще немного, до полной зарядки аккумулятора.

Перевод аккумулятора в режим хранения - очень длительная процедура. Зарядное устройство iSDT SC-608 разряжает аккумулятор током всего 0.3 ампера! Так что имеет смысл переводить в режим хранения только разряженные аккумуляторы.

Я честно прождал несколько часов, но так и не дождался завершения процедуры перевода аккумулятора в режим хранения:)
Поделюсь своими впечатлениями от зарядного устройства iSDT SC-608. К плюсам отнесу компактность, умещается на ладони. Так же малый вес, очень быструю балансировку, поддержку довольно большого тока заряда, тихий вентилятор охлаждения. К минусам отнесу маркую и быстро покрывающуюся царапинами лицевую панель, низкий ток разряда, отсутствие в комплекте кабеля для обновления прошивки. Хотя последнее исправили, выпустив по той же цене зарядное устройство iSDT SC-608 в комплекте с кабелем.
Если у вас нет блока питания, то в продаже есть супер-навороченный блок питания iSDT CP-16027 160W 27V как раз для этой зарядки.

Он стоит даже дороже самой зарядки! Но зато имеет всевозможные защиты на все случае жизни. По мне, так и блок питания от старого ноутбука неплохо справляется:)
Подписаться на:
Сообщения
(
Atom
)