FPV-шлем Eachine VR D2 собрал в себе несколько интересных особенностей. Это подвижная линза Френеля, diversity-приемник и встроенный модуль DVR.

Краткие характеристики FPV-шлема Eachine VR D2:
- Вес: 491гр.
- Размеры: 150x152x96мм.
- Экран: 5 дюймов, 800x480 пикселей.
- Аккумулятор: 2200мА/ч 7.4В.
- Приемник: Diversity, 40 каналов, чувствительность -95dBM.
- Разъем антенн: RP-SMA.
- Встроенный DVR.
- Регулировка расстояния от линзы Френеля до экрана.
- Индикатор низкого напряжения аккумулятора.

Когда распаковал коробку, то удивился - FPV-шлем Eachine VR D2 оказался совсем миниатюрным! По сравнению с Eachine EV800, он короче и, как мне показалось, немного более узкий.

В комплекте, кроме шлема, было две антенны: клевер и патч, аккумулятор, зарядное устройство, переходник для зарядного устройства, инструкция и пара салфеток.

FPV-шлем Eachine VR D2 по конструкции очень простой. Сделан из двух пластиковых половинок. Сразу бросилось в глаза то, что крепление ремешков вынесено на отдельных петлях, а не сделано вырезами в корпусе шлема. Так лучше, в этих областях засветок не предвидится.
С лицевой стороны расположены все кнопки управления и небольшой красный индикатор текущей частоты работы приемника.

Индикатор прикрыт очень мягким куском прозрачного пластика, на котором остается куча царапин, даже при довольно бережном обращении. Верхние две кнопки служат для выбора частоты работы приемника. Причем они перепутаны местами:) Кнопка FR выбирает частоту, а кнопка CH - диапазон. У FPV-шлема Eachine VR D2 нет автоматического поиска частоты работы приемника, нужно выбирать вручную.
Первые три кнопки служат для управления модулем DVR. Кратко расскажу их функции:
Запись видео: Если нажать кнопку со стрелкой влево - начнется запись видео. Остановка записи - нажать эту же кнопку еще раз.
Настройки: Нажать и удерживать кнопку с квадратиком. На экране будет первое меню настроек. Здесь есть выбор разрешения VGA-640x480, D1-720x480 и HD-1280x720, выбор возможности записи звука и выбор времени записи фрагмента видео. Чтобы попасть во второе меню настроек, нужно снова нажать и удерживать эту же кнопку. В следующем меню есть форматирование карты памяти, выбор языка (есть русский), сброс настроек, выбор частоты электросети для защиты от мерцания ламп, выбор режима PAL/NTSC. Для выхода из режима настройки нужно снова нажать и удерживать кнопку с квадратиком.
Воспроизведение: Нажать и удерживать кнопку со стрелкой вправо. Здесь есть выбор ролика для просмотра кнопками со стрелками, для воспроизведения нужно нажать кнопку с квадратиком, для паузы так же нажать эту кнопку. Во время воспроизведения кнопками со стрелками можно менять скорость и направление воспроизведения. Если нажать и удерживать кнопку с квадратиком, то можно попасть в меню удаления файлов и выбора громкости звука воспроизведения. Для выхода из режима воспроизведения нужно нажать и удерживать кнопку со стрелкой вправо.
Кнопка Power/- служит для отключения питания монитора для экономии энергии во время записи. То есть приемник и модуль DVR продолжают работать, если нажать эту кнопку. Функция может быть полезна, если нужно просто записать чей-то полет. В режиме настройки параметров монитора эта же кнопка служит для изменения значения текущего параметра.
Кнопка Menu вызывает на экран параметры монитора. Повторное нажатие кнопки вызывает следующий параметр.
Кнопка CAM/DVR/+ служит для переключения между режимом DVR и обычным режимом работы шлема. А в режиме настройки параметров монитора эта кнопка служит для изменения значения текущего параметра.

Сверху расположены RP-SMA-разъемы для антенн, слот для карточки microSD, выход шнура питания шлема и два красных индикатора. Индикаторы показывают, какой из приемников активен в данный момент.

По бокам шлема расположены ползунки, которые изменяют положение линзы Френеля. Ползунки никак не связаны между собой, так что нужно постараться двигать их одновременно, чтобы линза внутри стояла ровно, без перекоса.

Снизу есть отверстие с резьбой для установки шлема на штатив. Если использовать шлем только для записи, то это будет удобно. Не летать же со шлемом, который стоит на штативе:)

В задней части, прилегающей к лицу, FPV-шлем Eachine VR D2 имеет очень глубокий выступ для носа. Соответственно там будут очень большие засветки. К лицу шлем прилегает вполне комфортно. По бокам так же могут быть небольшие засветки. Исправляется наклеиванием еще одного слоя уплотнителя.

Крепление аккумулятора сделано как-то по глупому. Он просто вываливается! Нет, он конечно держится, если надеть шлем на голову, но как-то не очень надежно. Я бы приклеил на аккумулятор и пластину обычную липучку для аккумуляторов, тогда бы оно держалось надежно.

Сам аккумулятор литий-ионный, на две банки, емкостью 2200мА/ч. Собран из двух элементов 18650. Внутри имеется плата балансировки с защитой от перезаряда. Из аккумулятора выходит провод со штекером 5.5мм, примерно таким. Если аккумулятор разрядится, то шлем будет пищать и на индикаторе спереди будет надпись Lo.

К аккумулятору прилагается зарядное устройство на 8.4 вольта. Заряжать будет током в 1А. Вполне нормально для таких аккумуляторов.
У приемника FPV-шлема Eachine VR D2 заявлена высокая чувствительность в -95dBM, но это просто маркетинговый ход. Приемник построен на модулях RX5808, а у них заявленная чувствительность -90dBM. Сетка каналов приемника построена в непривычном числовом формате. Первая цифра - выбор диапазона, а вторая - частоты.

В комплекте со шлемом шли две антенны: обычный клевер и патч. У антенн стоят RP-SMA-разъемы.

Я тут же разобрал клевер, чтобы посмотреть, что внутри. Оказался самый обычный клевер из вырубки. Да еще и не вставленный в пазы корпуса:)

А вот патч в комплекте с сюрпризом. Он заклеен впереди токопроводящей пленкой! Если нужно, чтобы он хоть как-то работал, то пленку нужно убрать!

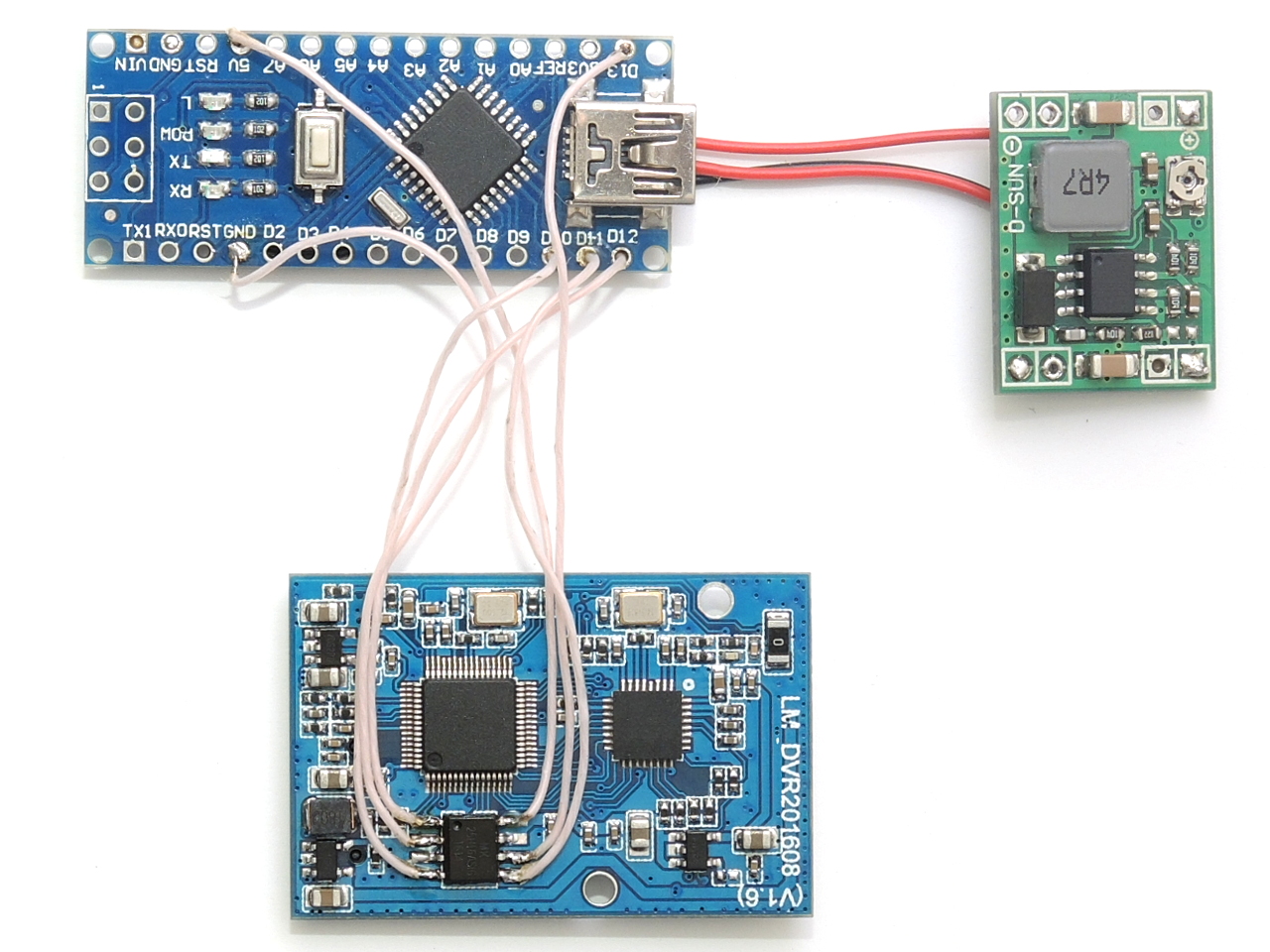
Перед использованием FPV-шлема Eachine VR D2 необходимо сразу же обновить прошивку в модуле DVR. Для этого скачиваем архив с прошивкой, распаковываем, копируем файл CRESFW.BIN на чистую SD-карточку, вставляем SD-карточку в шлем и включаем питание. Ждем примерно пару минут. Если выключить питание раньше, чем обновиться прошивка в модуле DVR, то больше его запустить не получится. Придется восстанавливать прошивку. Обновление прошивки исправляет обрезание видео в PAL-режиме.
Чтобы в FPV-шлеме Eachine VR D2 можно было одновременно летать и записывать видео на DVR, нужно перейти в режим DVR, включить запись, вернуться обратно в режим полета. Если попробовать летать в режиме DVR, то будет приличная задержка и качество картинки на экране будет заметно ниже. Кстати, DVR будет записывать видео без звука, даже если на летательном аппарате установлен микрофон!
FPV-шлем Eachine VR D2 разбирается очень легко. Просто нужно открутить четыре винтика снизу.

Шлем разбирается на две половинки, но не полностью. Полностью разобрать не дает мягкая накладка, которая прилегает к лицу. Внутри FPV-шлем Eachine VR D2 оклеен материалом, похожим на бархатную бумагу. Это очень хорошо, бликов не будет.

Линза Френеля расположена на двух ползунках. С лицевой стороны линза заклеена транспортной пленкой. Ее нужно будет убрать перед использованием. Размеры линзы Френеля 122x75мм, толщина 2мм, увеличение 3.5X.

Матрица просто вставлена в пазы половинок шлема. Приемник с блоком DVR закреплен только двумя гайками антенных разъемов. Справа, прямо к корпусу шлема, приклеена пищалка. Кнопки сделаны единым блоком. Теперь извлеку всю начинку.

Как говорил выше, diversity-приемник собран на модулях RX5808. С лицевой стороны расположен один из модулей приемника, все кнопки управления шлемом и индикатор частоты. С обратной стороны находится второй модуль и стабилизатор питания. К приемнику прикручены две пластиковые стоечки, к которым крепится модуль DVR.

Сам модуль DVR - копия Eachine ProDVR, о котором уже рассказывал раньше, только другой ревизии. В Eachine ProDVR была ревизия V1.1, а в FPV-шлеме Eachine VR D2 стоит ревизии V1.6. В общем, эта новая ревизия модуля имеет другую микросхему оцифровки аналогового сигнала. Поэтому может наблюдаться проблема с периодическими мигающими черными экранами на записанном видео. Об этом говорят на форумах rcdesign.ru и rcgroups.com. Можно вылечить только заменой модуля. По поводу замены обращайтесь к продавцу.
Не буду размещать примеры записанного на DVR видео, так как квадрик сейчас находится в ремонте - сгорел видеопередатчик. Но я уверен, что видео не будет ничем отличаться от того, что я размещал в рассказе о Eachine ProDVR.
Меню управления модулем DVR не изменилось и осталось таким же, как у Eachine ProDVR:
Матрица FPV-шлема Eachine VR D2 имеет разрешение 800x480 пикселей. По качеству изображения она немного отличается от матрицы FPV-шлема Eachine EV800 в лучшую сторону.

По качеству, да и по внешнему виду меню настроек, матрица шлема больше всего похожа на матрицу от этого пятидюймового монитора. Такие матрицы используют все мои друзья в своих самодельных шлемах.

В настройках матрицы можно изменять яркость, контрастность, насыщенность, соотношение сторон: 16:9 или 4:3, и язык (русский присутствует). "Синего экрана" у матрицы нет.
На голове FPV-шлем Eachine VR D2 сидит вполне комфортно. Про возможные засветки по бокам и в районе носа уже упоминал.

Мне удалось найти такое положение линзы Френеля, что с моим плохим зрением летать было удобно. А вот некоторым друзьям с возрастной дальнозоркостью не удалось найти приемлемое положение линзы. Все равно требовалось отодвигать шлем от лица, чтобы увидеть сфокусированное изображение. С очками шлем не получится использовать - узковат. Но можно встроить очки без дужек прямо в корпус шлема.
Подводя итоги, в плюс FPV-шлему Eachine VR D2 могу записать компактность, малый вес, изменяемое положение линзы Френеля, diversity-приемник, наличие модуля DVR, защиту от бликов внутри шлема. К минусам запишу засветки по бокам и в районе носа, отсутствие видео-аудио входов-выходов, невозможность использовать с очками, плохое крепление аккумулятора, отсутствие автоматического поиска частоты работы приемника.
Пока делал обзор Eachine VR D2, появилась обновленная версия шлема Eachine Goggles One - Eachine Goggles Two с diversity-приемником! Может и по нему сделать обзор? :)