
Краткие характеристики Beta85X HD:
- База: 85мм
- Вес: 75.5г (без аккумулятора)
- Моторы: 1105 6000kV
- Пропеллеры: четырехлопастные Emax Avan 2"
- FullHD-камера: Caddx Turtle V2
- Канопа: Beta85X HD
- Приемник на выбор: Frsky XM+/DSMX/Futaba S-FHSS/Flysky/TBS Crossfire
- Рама: Beta85X
- Передатчик: 48 каналов, мощность 0/25/200мВт
- Аккумуляторы: 2-3S на 450мА/ч
- Процессор: STM32F405
- Гироскопы: MPU6000
- Размер: 26x26мм
- Прошивка: BetaFlight 3.5.0 OMNIBUSF4SD (OBSD)
- OSD: Встроенное BetaFlight OSD
- Доступен SmartPort для управления видео-передатчиком
- Прошивка блока регуляторов: BLHeli_32 BETAFPV-16A-32bit
- Поддержка DShot1200
- Входящее напряжение: 2-3S
- Номинальный ток: 16А
- Максимальный ток: 25А
- Сенсор: 1/2.7" CMOS
- Формат видеосигнала: NTSC/PAL
- Разрешение видео: 1080P@60fps/1080P@30fps/720@60fps
- Напряжение питания:4.5-20В
- Угол обзора по FPV: 155°
- Угол обзора при записи: 170°
- Разрешение сенсора: 2 Мегапикселя
- Линза: 1.8мм Turbo Eye
- Потребляемый ток: 380мА@5В/160мА@12В
- Поддержка OSD
- Формат записываемых файлов: MP4
- Поддержка записи звука
- Максимальный поддерживаемый объем SD-карты: 64ГБ

Комплектация не просто скудная, а можно сказать, что ее и нет. В коробке только квадрик и пульт с проводком для настройки камеры Caddx Turtle V2. Ах да, еще визитка со ссылками на поддержку компании и группу в FB:)

Первое впечатление от квадрика - какой же он непривычно большой и тяжелый! Квадрик вписывается в квадрат 120x120мм. В передней части под козырьком канопы пристроилась камера. Угол наклона камеры можно регулировать в небольших пределах.

Сзади стоит блок цветных управляемых светодиодов, виден силовой XT30-разъем. В вырезе канопы пристроился передатчик с Micro AXII-антенной. То, что передатчик частично торчит наружу, да еще катушкой стабилизатора, не очень понравилось. Можно было сделать на канопе небольшой наплыв, чтобы защитить передатчик.

Снизу нет никакого держателя под аккумуляторы, просто площадка с парочкой наклеенных прорезиненных полосок. Аккумулятор фиксируется ремешком. Из под проводов в задней части торчит USB-разъем для настройки полетного контроллера. Моторы крепятся на два болтика вместо четырех.

В передней части справа из под канопы высовывается коннектор, который идет на плату камеры. Непонятно по какой причине его не спрятали под канопу, хотя бы под тонкий слой пластика. А так получается, что провода находятся в паре миллиметров от вращающегося пропеллера.

С левой стороны в углублении видна кнопка управления записью камеры. Надеюсь, что она не пригодится, попробую вывести управление камерой на пульт.

Слот под SD-карту находится с правой стороны. Нет никакой внешней защелки, чтобы фиксировать карту внутри слота. Это плохо, так как при аварии есть вероятность потерять карту памяти. Придется каждый раз заклеивать этот вырез скотчем или изолентой.

Кнопка управления передатчиком доступна в заднем вырезе канопы. Управлять передатчиком можно через OSD, так что кнопка вряд ли пригодится, очень зря ее выставили наружу.

Блок светодиодов имеет два выреза в плате, которые попадают в горизонтальные выступы рамы. Надеялся, что по своей воле светодиоды из рамы не будут выскакивать при падениях. Ага, наивный. При первом же краше повисли на проводах! Посажу на клей E6000.

На квадрике стоят мощные 1105-моторы BetaFPV на 6000kV. Моторы рассчитаны на питание 2-4S. Сниму их и разберу подробнее чуть ниже.

Изначально производитель заявил, что квадрик поддерживает напряжение питания до 4S, но позже сделал предупреждение, что при питании от четырех банок возможно воспламенение силовых ключей на плате блока регуляторов. Поэтому производитель настоятельно не рекомендует использовать 4S-аккумуляторы на этой модели! На трех банках у квадрика мощности и так достаточно.

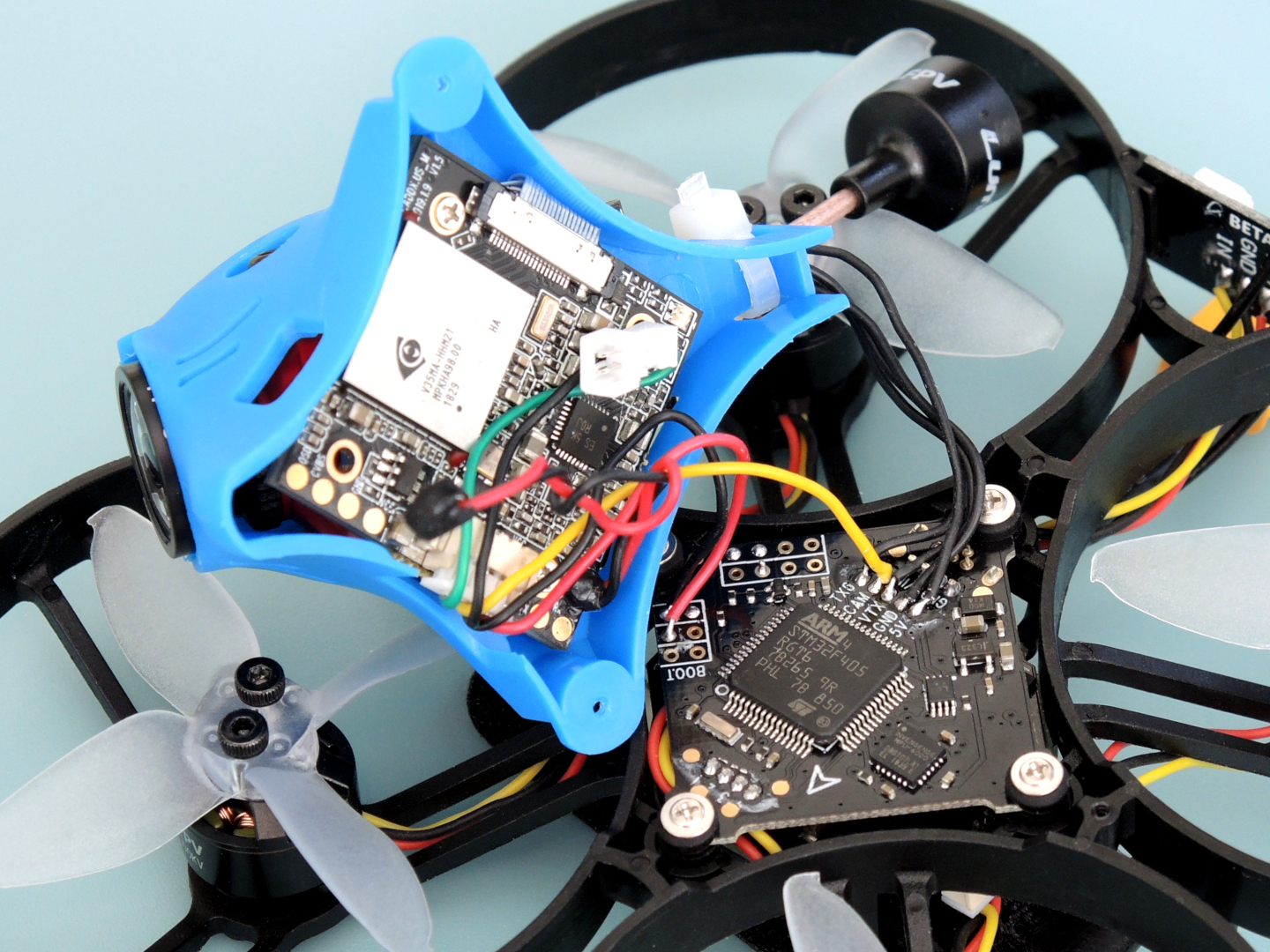
Постепенно начинаю разбирать Beta85X HD. Снимаю канопу и вижу не очень хорошую картину. От камеры к полетному контроллеру идут всего три провода и они не скручены между собой. Такая же картина с проводами от полетного контроллера к передатчику. Значит будь готов к помехам по питанию на видео:) Микрофон был просто подсунут в переднюю часть канопы и болтался на проводах. Разъем для настройки камеры так же был просто спрятан под канопой.
Можно избавиться от разъема, идущего от полетного контроллера на камеру, перекинув провода на площадки под пайку рядом с разъемом. Тогда и шанса повредить пропеллером провода, торчащие из разъема, не будет.
Снял ремешок крепления аккумулятора. Под ним, прямо над площадкой под аккумулятор, приютился приемник FrSky XM+, так что телеметрии на пульт не будет. Ладно, не критично. Кстати, производитель ни в какую не хочет скрутить вместе провода, идущие от мотора, уже на третьем их квадрике подряд такое наблюдаю. Скручиваю самостоятельно.

Рама сделана из вязкого прочного пластика. По моему, рама не рассчитана на очень сильные удары. Если влететь в препятствие на приличной скорости, может и не выдержать. Весит рама 10.7 грамм. В передней части имеются какие-то круглые выступы, не понял, для чего они предназначены.

Разобрал мотор, чтобы лучше было видно, что внутри. Ротор довольно тяжелый, не рассчитанный на высокие обороты. Быстрого разгона с такими массивными магнитами ожидать не стоит. Это скажется на управляемости, квадрик будет как бы вальяжным. Выходной диаметр вала 1.5мм, пропеллер крепится болтиками. В таком размере мотор, понятное дело, на подшипниках. Весит мотор 5.2 грамма. По моему, такие моторы больше подойдут для пропеллеров на 2.5 дюйма, для двухдюймовых они излишни по весу и мощности. Кстати, вес крепежных M2-болтиков на один мотор получается 0.4г.

Пропеллеры Emax Avan весят 0.86 грамма, но тут еще стоит учитывать вес крепежных M2-болтиков, они еще добавят 0.44 грамма. Вроде и немного, но из таких мелочей и набегает итоговый вес. Попробую заменить болтики на пластиковые.

Вес основной электроники квадрика составляет 17 грамм. Блок полетного контроллера и регуляторов состоит из двух плат, как у всей X-серии. Регуляторы поддерживают прошивку BLHeli_32, что дает хороший задел на будущее в плане использования RPM-фильтров, когда их доведут до ума. Полетный контроллер на F405-процессоре с MPU6000-гироскопами. На борту есть BetaFlight OSD, три UART-порта, выводы под пищалку и управление цветными светодиодами.

Порт UART1 выполнен с инвертором, на нем висит приемник FrSky XM+. Передатчик так же из X-серии, только ставится не поверх полетного контроллера, а вынесен на проводах в заднюю часть канопы. Кстати, внутри канопы он никак не закреплен, просто плотно вставляется и фиксируется только стяжкой за антенну.

Камера Caddx Turtle V2 весит 13.65 грамма. Камера уже оборудована новой линзой Turbo Eye. Микрофон камеры просто болтается на паре проводков, можно установить его в любое место на квадрике.

Канопа очень легкая и жесткая, весит 3.8 грамма. Чувствуется, что прочности ей не хватит, до первой аварии. Сейчас на официальном сайте продается мягкая канопа, вот с ней будет намного лучше.

Вот так переделал подключение камеры к полетному контроллеру. От камеры вывел RX в UART3-TX и TX в UART3-RX. Да, без разъема стало менее удобно, но провода сделал достаточно длинные, канопу легко снять.

Первое, что хотелось сделать - обновить прошивку камеры. В камере была версия прошивки, датированная концом января 2019 года, как я думал, без поддержки RunCam-протокола, а значит без возможности управлять камерой с пульта.

На официальном сайте никаких обновлений прошивки не нашел. Производитель объяснил отсутствие свежих прошивок большим числом обращений из-за отказов камеры после попыток обновить прошивку. Свежую прошивку можно найти на rcgroups во втором посте топика о Caddx Turtle. Эта же прошивка нашлась в описании работы RunCam-протокола управления камерой на BetaFlight-вики. Вот прямая ссылка на новую прошивку. В архиве содержится файл SPHOST.BRN, бросаю его на чистую SD-карту и вставляю в камеру. Подаю питание на камеру и наблюдаю за процессом прошивки. Примерно минуту на экране была следующая картина.

Затем экран просто почернел, камера не перезагрузилась. Подождал еще полминуты и отключил питание. Извлек SD-карту, прошивка с нее не удалилась, сделал это самостоятельно, а то при следующем включении камера снова будет обновляться. Настройки камеры сбросились. Зашел в меню, чтобы посмотреть версию прошивки. Каково же было удивление, когда увидел ту же самую версию! Сначала подумал, что прошивка не обновилась, но раз настройки сбросились, значит обновление было. Получается, что прошивку в камере можно было не обновлять, зря старался, эта версия уже поддерживает RunCam-протокол. Стал настраивать камеру и в какой-то момент на ровном месте камера зависла. Ладно, перезагрузил квадрик, камера заработала. Только попробовал что-то изменить в меню настроек - камера снова зависла и больше не завелась. Поймал желтый экран смерти - камера ни на какие действия не реагирует:(

По информации из интернета причин две: плохой шлейф от сенсора до основной платы или отказ сенсора. На интересную мысль навел пост от BetaFPV на подобную тему. Стал разбираться и обнаружил разрушенный разъем на плате сенсора. Пластиковая колодка разъема была расколота и последний пин был замят.

Явный брак при сборке камеры. Как оно вообще работало - непонятно. Наверное, контакт все же был, а потом, когда пошевелил шлейф камеры, контакт исчез. Так и пришлось ставить новую плату с сенсором, спасибо друзьям - дали новую камеру, а на старую продолжаю искать колодку разъема I-PEX 20374-020E-31 под шлейф. Уверен, что замена разъема вернет сенсор к жизни. Если у вас обнаружилась такая же проблема - обращайтесь в поддержку BetaFPV, камеру заменят. Кстати, при замене сенсора пришлось перенастраивать фокус линзы. Не получилось идеально настроить, FPV-картинка нормальная, а на записи видно, что линза немного не в фокусе.

В настройках камеры уменьшил насыщенность и зернистость по рекомендациям Альберта Кима. Позже еще покручу настройки камеры.
Проверил направление вращения моторов и немного изменил настройки регуляторов, уменьшил время срабатывания маяка до двух минут и поднял громкость маяка на максимум. Заодно проверил в работе приложение BLHeliSuite для Linux, отлично работает, проблем не нашел.

В регуляторах уже была самая свежая версия прошивки, обновление не потребовалось. Пока не буду ставить тестовую версию BLHeli_32 с Bidirectional DShot, подожду завершения тестирования. Громкость маяка выставил на 200. С таким значением моторы пищат довольно громко, издалека слышно. Не надо ставить громкость маяка на максимум, вообще перестанет работать!
Изначально в полетном контроллере была прошивка BetaFlight 3.5.0 для OMNIBUSF4SD. Базовые параметры квадрика были настроены, сохранил их здесь. Пока не буду перескакивать на свежую прошивку четвертой версии, по моему, она еще сыровата, буду использовать версию 3.5.7.
Базовые настройки почти все подошли, по крайней мере, PID-ы только слегка подкорректировал. Включил управление камерой по RunCam-протоколу на UART3 и подобрал расходы под себя.
# version
# Betaflight / OMNIBUSF4SD (OBSD) 3.5.7 Mar 15 2019 / 22:11:36 (e9130527c) MSP API: 1.40
# reset configuration to default settings
defaults nosave
# name
name 85XHD
# feature
feature -RX_PARALLEL_PWM
feature RX_SERIAL
feature LED_STRIP
# beeper
beeper -ALL
# beacon
beacon RX_LOST
beacon RX_SET
# serial
serial 0 64 115200 57600 0 115200
serial 2 16384 115200 57600 0 115200
serial 5 2048 115200 57600 0 115200
# led
led 0 0,0::A:0
led 1 1,0::A:0
led 2 2,0::L:0
led 3 3,0::L:0
# mode_color
mode_color 6 0 2
# aux
aux 0 0 0 1900 2100 0 0
aux 1 13 1 1400 1600 0 0
aux 2 28 0 1900 2100 0 0
aux 3 33 3 1900 2100 0 0
aux 4 35 1 1900 2100 0 0
# adjrange
adjrange 0 0 2 900 2100 12 2 0 0
# master
set mag_hardware = NONE
set baro_hardware = NONE
set rssi_channel = 16
set rc_interp = OFF
set fpv_mix_degrees = 35
set serialrx_provider = SBUS
set blackbox_device = NONE
set dshot_idle_value = 650
set motor_pwm_protocol = DSHOT1200
set current_meter = VIRTUAL
set ibatv_scale = 90
set ibatv_offset = 29
set beeper_dshot_beacon_tone = 4
set yaw_motors_reversed = ON
set small_angle = 180
set pid_process_denom = 1
set osd_cap_alarm = 300
set osd_tim1 = 1792
set osd_tim2 = 1025
set osd_vbat_pos = 2497
set osd_rssi_pos = 2513
set osd_tim_2_pos = 2518
set osd_flymode_pos = 377
set osd_anti_gravity_pos = 465
set osd_throttle_pos = 2505
set osd_current_pos = 417
set osd_mah_drawn_pos = 439
set osd_craft_name_pos = 2113
set osd_stat_max_spd = OFF
set osd_stat_battery = ON
set osd_stat_bbox = OFF
set osd_stat_bb_no = OFF
set vcd_video_system = PAL
# profile
profile 0
set anti_gravity_gain = 2000
set iterm_relax = RP
set p_pitch = 65
set i_pitch = 80
set d_pitch = 52
set f_pitch = 96
set p_roll = 65
set i_roll = 80
set d_roll = 52
set f_roll = 96
set p_yaw = 75
set i_yaw = 70
set d_yaw = 0
set f_yaw = 100
# restore original profile selection
profile 0
# rateprofile
rateprofile 0
set roll_expo = 25
set pitch_expo = 25
set roll_srate = 77
set pitch_srate = 77
# rateprofile
rateprofile 2
set roll_rc_rate = 70
set pitch_rc_rate = 70
set roll_expo = 25
set pitch_expo = 25
# restore original rateprofile selection
rateprofile 0
# save configuration
save
По полету квадрик таки ближе к тинивупам, чем к большим аппаратам. Легко и непринужденно выруливал над землей, обходя препятствия. Честно сказать, очень боялся вжаривать, надо привыкнуть с весу квадрика, почувствовать подхват, довести настройки до ума. Как и предполагал, стоковые пропеллеры маловаты для 1105-моторов, надо чуть больше или лопасти пошире. Попробую Gemfan Hulkie 2036, должны хорошо подойти. Аккумулятора Tattu 3S/450мА/75C легко хватает на почти пять минут неспешного полета. Аппарат висит на 40% газа. Удивительно, но при значительно большем весе относительно других пауэрвупов, квадрик сдувает ветром! Даже Trashcan так не сдувало, а Beta85X HD серьезно боится небольших порывов.
В камеру Caddx Turtle V2 смотреть очень даже приятно, не так, как в RunCam Split, но есть нюанс. Картинка на очки приходила без задержки, но немного рваная. Скорее всего, это связано с тем, что использовался PAL-режим на 25 кадров, а камера снимает на 60 кадров. То есть, по FPV выводится каждый второй или третий кадр. Отсюда и картинка чуть рваная. Надо попробовать NTSC-режим на 30 кадров, там четко каждый второй кадр будет выводиться. А в камеру бы добавить режим съемки 1920x1080@50fps, чтобы в PAL-режиме все было хорошо.
Youtube, как обычно, не вытянул картинку, жестоко обрезав битрейт и превратив листву в квадратики:( Поэтому прилагаю не так сильно пережатый исходный файл.
И есть еще небольшая проблема совместимости камеры Caddx Turtle V2 и приемника ImmersionRC RapidFire. Может случится так, что приемник начнет терять картинку. Случай не единичный, несколько пользователей отметили аналогичное поведение. Надеюсь, в ближайшем обновлении прошивки приемника проблему устранят.
Сейчас производитель выпустил анонс начала тестирования версии с поддержкой напряжения 4S на раздельном полетном контроллере с 32-битными регуляторами и AIO-контроллере. Если AIO-контроллер сможет выдерживать такие нагрузки - это будет бомба! Ждем...

Следующий синевуп для сравнения - Happymodel Mobula7 HD. Он уже проехал таможню и скоро попадет мне в руки.
Спасибо за обзор! Коптер отличный. Уже давно летаю на нем. У меня даж два :) на 4s тоже не решился попробовать его - на 3s со временем привыкаешь и уже маловато. Но это коптер для съемок близко и очень близко, поэтому нормально. Вот например снимал ребят : https://youtu.be/xHE4NuosarA такой коптер не особо боятся, и даже в руку ловят. Будет интересно сравнить его с мобулой. У меня кстати такой ньанс на этих бетках - взлетел высоко и хочешь упасть камнем (эрмод конечно включен). убираем газ, он подает, но в какой-то момент его начинает закручивать.. как будто в поток ветра попадает.
ОтветитьУдалитьЭто называется Washout. Я нашел лекарство от этой беды, перенастроив квадрик по этим рекомендациям.
Удалить