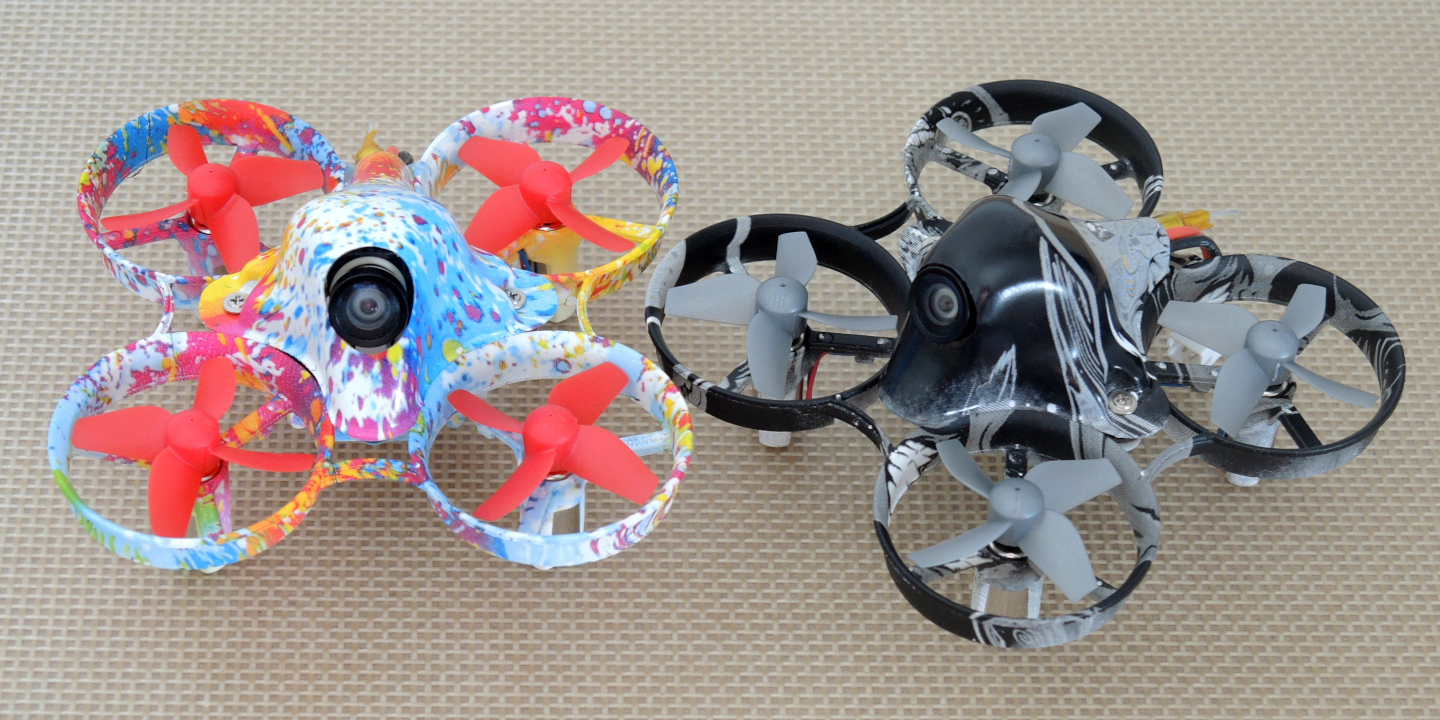
Себе выбрал комплект поярче, а сын выбрал брутальную расцветку, ибо возраст такой:)
Комплекты приехали отлично упакованные в плотные прозрачные коробки.

Первое впечатление - рамы намного более жесткие по сравнению с однотонными вариантами. Рисунок нанесен аквапринтом, видимо из-за этой дополнительной пленки и прибавилась жесткость. Но прибавился и вес. Рама стала весить 4.65 грамма, что катастрофически много! Для примера, рама донора Eachine E011 весит 3.75 грамма, что почти на грамм легче. А канопа, напротив, не прибавила в весе. Как был вес у синих и прозрачных каноп в диапазоне 1.0-1.2 грамма, так и у раскрашенных остался.
Про канопы BetaFPV хочу сказать отдельно. То, что вес их гуляет в довольно большом диапазоне - не самая большая проблема.

Очень сильно раздражает разная высота расположения отверстия под объектив камеры. Где-то оно имеет нормальное положение, а где-то расположено настолько высоко, что установить камеру под более-менее адекватным углом не представляется возможным. Только от 30 градусов и выше. Ну зачем такое тинивупу с его-то скоростями? Там 20 градусов - предел, выше нет необходимости задирать.
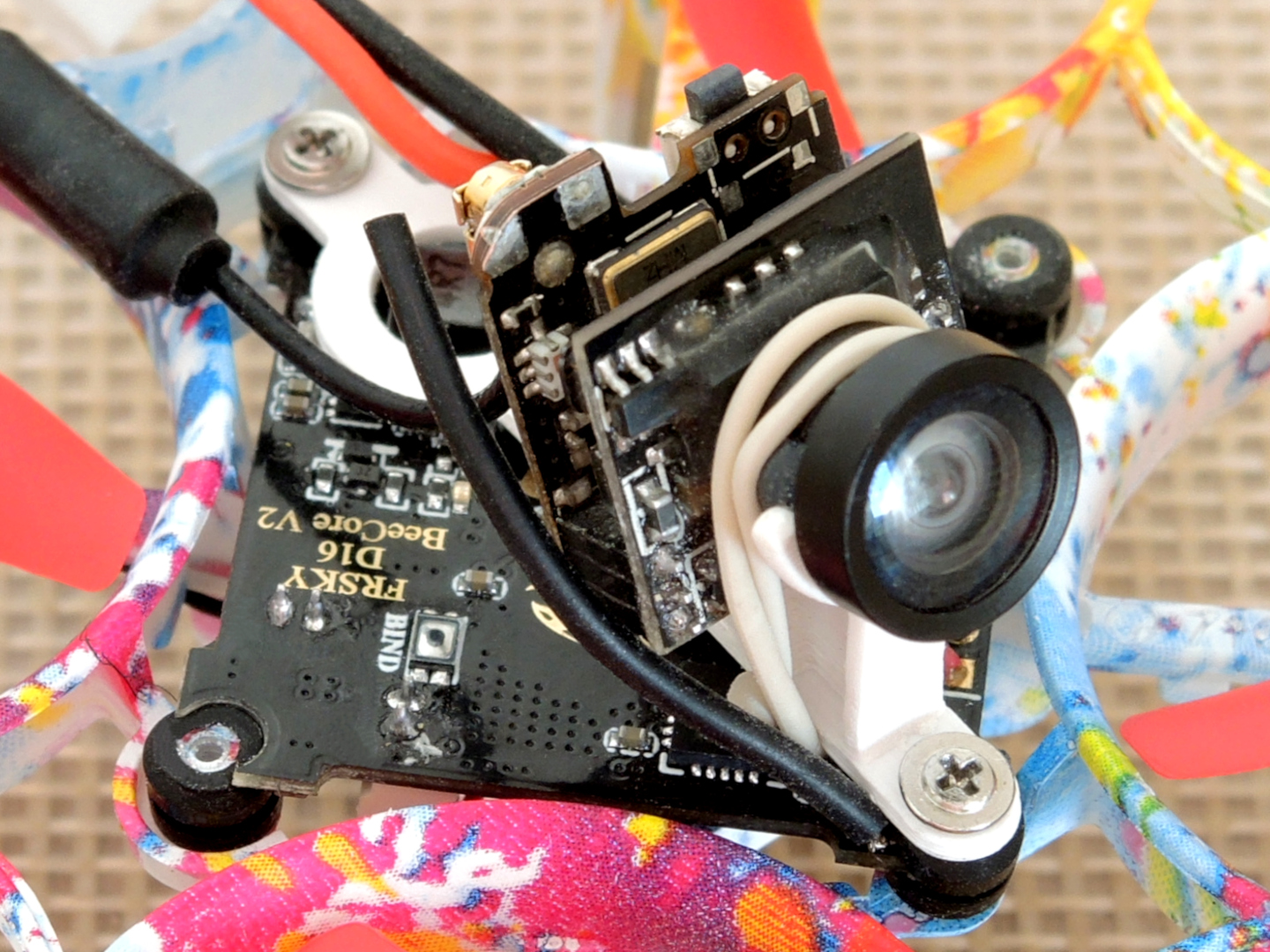
Оставалось придумать, как организовать крепление камеры. Камеру требуется приподнять на довольно большую высоту относительно плоскости установки канопы и любое традиционное крепление будет иметь большую массу. С такой же проблемой столкнулся при сборке бесколлекторного вупа и окончательное решение мне не понравилось. Пришлось использовать методы нетрадиционного мышления, которые раньше выручали при работе программистом:) Сначала обозначил ключевые условия: малый вес, жесткая фиксация камеры, крепление только в двух точках над полетным контроллером - спереди и сзади, ибо любое крепление по бокам автоматом приподнимет канопу над рамой (канопа будет устанавливаться поверх крепления) и внешний вид квадрика будет не очень. То есть, это должна быть полоска пластика с двумя отверстиями на которой установлена камера. Если прихватить камеру просто за объектив, то ерунда получается - объектив к плате камеры прихвачен термоклеем, который от нагревания передатчика может размякнуть и объектив отвалится от платы камеры. И еще возникает проблема с точным горизонтальным положением камеры - придется долго и упорно подбирать его визуально. Если использовать крепление в форме коробки, вариантов которого много на thingiverse.com, то это нагонит веса. А еще придется думать, как такую коробку приподнять и прочно разместить на полоске пластика. Что если не пытаться упаковать камеру в оболочку, а насадить ее на что-нибудь, как пельмень на вилку? Камера с передатчиком состоит из двух параллельно расположенных плат, между ними есть зазор. Вот этот зазор и можно использовать! Попробовал сделать набросок в OpenSCAD. Как и раньше, можно менять угол наклона, продольное положение, высоту установки камеры и еще ряд параметров. Итоговый файл расположен здесь.

Получается не сильно много пластика и камеру можно зафиксировать петлей из резинки. Стал печатать модель и подбирать высоту установки, угол наклона и продольное положение камеры. Печатал из ABS-пластика слоем 0,1мм с небольшим обдувом. После некоторого количества попыток получил подходящие значения, напечатал итоговый экземпляр и стал фиксировать камеру на квадрике. Но не тут-то было! Я примерял крепление на пустую раму, а когда стал устанавливать камеру поверх полетного контроллера, то обнаружилась проблема.

На полетном контроллере стоит очень высокая катушка индуктивности, поверх которой и проходит крепление камеры. Было два решения - пустить крепление поверх этого элемента или вокруг него. Решил, что вокруг будет более удобно по ряду причин.

Вес итоговой модели получился всего 0.4 грамма, что вполне допустимо. Камера стоит очень жестко, только в горизонтальной плоскости есть небольшая слабина из-за отсутствия поперечной планки, но это ни на что не влияет.

Угол камеры рядом с U.FL-разъемом антенны пришлось подточить надфилем, чтобы он не упирался в канопу. Это позволило на несколько градусов уменьшить угол установки камеры.
Катушка индуктивности на плате полетного контроллера больше не мешает:)

Такое крепление камеры выполняет еще две вспомогательные функции. Во первых, это дополнительный элемент жесткости, а во вторых планка крепления не дает выскакивать полетному контроллеру из заднего демпфера при подключении USB-разъема к компьютеру. В общем, одни плюсы:)
На квадрике сына крепление идеально подошло под канопу при угле установки камеры в 25 градусов.

С моей канопой получилось не все радужно. Вырез под камеру был на два миллиметра выше, да еще и кривоватый. Пришлось подрезать канопу, что не очень хорошо сказалось на внешнем виде. И угол установки камеры пришлось увеличить на три градуса. Уж лучше бы продавали эти канопы вообще без выреза под камеру, чем так.

По совету друга установил другой силовой PH2.0-разъем так, чтобы провод не перегибался при подключении аккумулятора. А чтобы пины разъема не вылезали из пластика - зафиксировал их каплей термоклея.

Силовые провода пропустил над рамой и вывел в задний вырез канопы рядом с антенной видео-передатчика. Не самое хорошее соседство, надеюсь наводок по видео не будет. Да и вообще антенне здесь не место, но куда еще ее вывести - не знаю. Позже уберу U.FL-разъем и заменю антенну на проводок.

Серые и черные пропики нашел на Али, красные были в комплекте с донором. Итоговый вес квадриков получился по 27 грамм и это очень много. В таком классе вес не должен превышать 25 грамм, иначе время полета на аккумуляторе в 250-260мАч будет заметно меньше, всего три минуты или около того. В общем, окрашенные рамы - не лучший выбор для коллекторного тинивупа, лучше уж однотонные из цветного пластика.
В качестве основы для настройки использовал проект Mockinbird. На квадриках решил попробовать предварительный релиз прошивки BetaFlight-3.5.0-RC1. Было интересно, как оно полетит с новым PIDFF-контроллером. Настройки мало отличаются от предыдущей сборки, поэтому приведу только получившийся файл конфигурации. Кстати, про некоторые особенности новой прошивки можно почитать здесь.
Оба квадрика полетели одинаково отлично! Новая версия прошивки пришлась к месту:) Позже сделаю видео, если выберусь куда-нибудь в интересное место. А следующим на очереди идет URUAV UR65. Модель уже приехала, скоро будет обзор!
Жаль такой вариант установки не подходит к коллекторному Е011, там задница платы мозга висит в воздухе.
ОтветитьУдалитьОказалось, что для E011 проще камеру в канопу от LDARC вставить - по весу меньше получается, чем крепление + канопа BetaFPV. Скоро буду делать заметочку по NFE SilverWare, под это дело как раз собрал вупчик из Деда Мороза. Там камера как раз в такой канопе стоит.
УдалитьДля этого ещё нужна канопа LDARC :) Так-то меня устраивала BetaFPV канопа - трон, которая шла вместе с камерой. Но сейчас камера перестала держаться в канопе, и при каждой посадке она вываливается наружу. Решил напечатать хоть какой-нибудь вариант на 3д-принтере.
УдалитьНу тогда можно добавить поперечную планку к креплению и укоротить продольную наполовину. Исходник есть, за вечер можно разобраться и дорисовать.
Удалить