
Тема FPV-полетов давно привлекает. Квадрокоптер Eachine Racer 250 пришелся очень кстати - появилась возможность поближе ознакомиться с предметом.
Коробка с моделью пришла довольно помятая. Внутри все оказалось в порядке. Квадрокоптер с аксессуарами был плотно упакован в пенистый материал.

В комплекте есть все необходимое для быстрого старта. Нужно только иметь свои передатчик и приемник. Для получения картинки с камеры так же потребуется еще и FPV-оборудование: монитор и приемник.

Перечислю, что было в комплекте: собственно квадрокоптер Eachine Racer 250, FPV-антенна, два комплекта пропеллеров Diatone 5х3: черные и белые, набор проводов для подключения приемника, фирменный ремешок для пульта, простенькое зарядное устройство с сетевым кабелем, карбоновый ключ для установки пропеллеров и аккумулятор 1500мА/ч 3S 25C.
Сразу же я разобрал квадрокоптер, чтобы все проверить, а заодно и показать все детали. На верхней карбоновой части рамы расположена площадка на красных силиконовых демпферах для установки экшен-камеры. С другой стороны закреплен видео-передатчик на 600мВт.

Почти что под площадкой для экшен-камеры находится красная кнопочка. Здесь же и гнездо для установки передающей антенны. Кнопочка служит для того, чтобы немного смещать по экрану OSD-данные.

Рядом с гнездом устрашающая надпись о том, что нужно обязательно установить антенну прежде чем подавать питание на квадрокоптер. Иначе передатчик может запросто сгореть.
Между верхней частью рамы и пластиковыми лучами установлены карбоновые прокладки.

Между нижней и верхней частями рамы установлена текстолитовая вставка. Судя по липучке, на эту деталь рамы предполагается установка сателлита, так как обычный приемник в пространство между верхней площадкой и этой вставкой просто не влезет.

Нижняя часть рамы выполнена из текстолита и содержит разводку для питания и управления регуляторами, стабилизатор питания и разъемы для подключения других элементов квадрокоптера.

С обратной стороны нижняя часть рамы обклеена пористым материалом. Видимо предполагается, что таким образом это защитит раму от ударов.

Но что-то мне подсказывает, что если на квадрокоптере активно летать и почти не падать, то вся эта защита со временем превратится в труху.
В передней части рамы установлен полетный контроллер CC3D. Да уж, чтобы подключить к нему USB-шнур для настройки, не разбирая рамы, придется сильно изловчиться.

Чуть спереди расположен стабилизатор питания на 5 вольт. С левой стороны находится выключатель подсветки квадрокоптера.

Причем с его помощью можно выбрать цвет подсветки задних огней квадрокоптера. Задняя светодиодная панель зафиксирована только пайкой к нижней части рамы.

Здесь же расположен силовой разъем XT-60 для подключения аккумулятора. Удобное решение - меньше проводов.

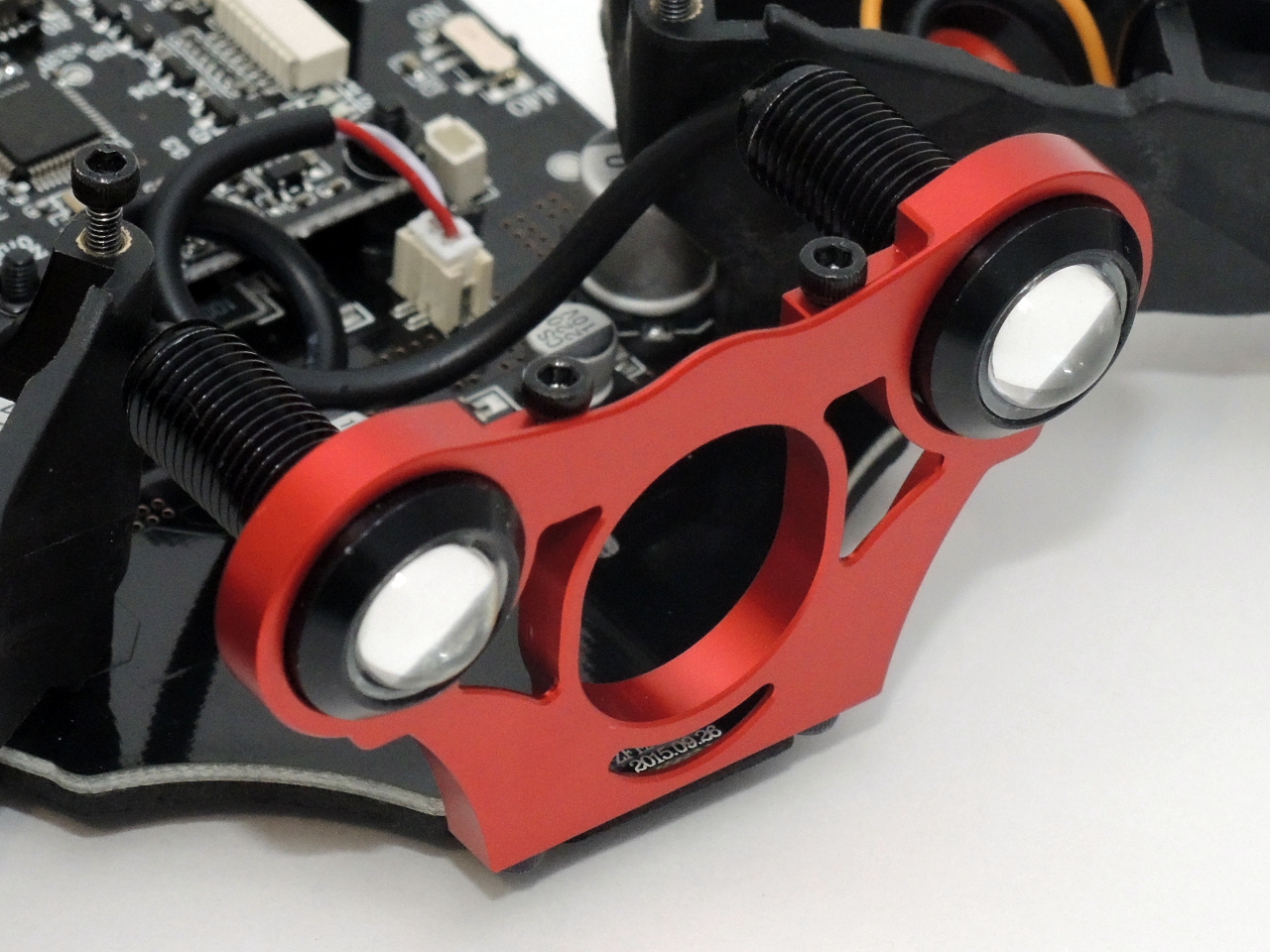
В передней части квадрокоптера Eachine Racer 250 установлены белые сверхяркие светодиоды мощностью по 3Вт каждый. Они закреплены на красивом алюминиевом кронштейне. Передние огни даже днем видно довольно далеко.
На квадрокоптере установлена CMOS видеокамера на 1000TVL с объективом на 2.8мм. Камера отлично показывает даже при низкой освещенности.

Перехожу к начинке лучей. Сами лучи изготовлены из прочного карбонизированного пластика. Я уже встречал подобный пластик на других моделях.

В углублении на луче закреплен стяжкой регулятор на 12А с прошивкой SimonK. На квадрокоптере установлены двигатели 2204 на 2300kV.

Довольно неплохие моторы, намотаны вполне прилично. Расстроили гайки крепления пропеллеров - они без отверстия. По опыту знаю, что фиксировать пропеллеры в поле ключем - развлечение для особо терпеливых. Разве что носить с собой накидную головку.

Передающая антенна в комплекте - самый обычный клевер. Для полноты картины сфотографировал и ее.

Пропеллеры Diatone 5х3 довольно мягкие. Хотелось бы большей жесткости. Ну ничего, это все равно расходники - потом обзаведемся нормальными.

Аккумулятор из комплекта неизвестного производителя 1500мА/ч 3S 25C. Будет использоваться только для настройки и первых полетов. Позже будут приобретены аккумуляторы ONBO 1600мА/ч 3S 45C.
Зарядное устройство совсем простенькое, даже без балансировки банок между собой. Позволяет заряжать аккумуляторы на 2 или 3 банки.

Я уже ремонтировал аналогичное зарядное устройство - сгорают там микросхемы, которые отвечают за контроль напряжения на банках.

Ремешок для передатчика очень даже ничего, вполне годный, с регулировкой длины и удобным карабином.
Теперь нужно установить приемник. Ранее планировалось использовать квадрокоптер с передатчиком Walkera DEVO7, поэтому был приобретен приемник Walkera RX601. Но позже было решено подключить квадрокоптер Eachine Racer 250 к передатчику Walkera DEVO10 с прошивкой Deviation. Подключение оказалось элементарным и не вызвало никаких проблем. Вот схема подключения:

Я извлек первые черный и красный провода из своих разъемов и вставил их в разъем с белым проводом, чтобы обеспечить питание приемника. Приемник устанавливается сверху на толстый двухсторонний скотч. Затем фиксируется стяжкой.

Расскажу процедуру сопряжения приемника Walkera RX601 c передатчиком Walkera DEVO10 с прошивкой Deviation:
- В передатчике создать новую модель, выбрать протокол DEVO и очистить FixedID, если стоит. Выключить передатчик.
- На приемнике Walkera RX601 нажать и удерживать кнопку Clean, подать питание на приемник, подождать несколько секунд, убрать питание с приемника и отпустить кнопку Clean.
- Включить передатчик и быстро подать питание на приемник. Через несколько секунд индикатор на приемнике будет гореть ровным красным цветом. Все, сопряжение состоялось.
- Зайти в настройки модели в передатчике, открыть поле FixedID. Там будет стоять шестизначное число. Нажать DONE, чтобы значение сохранилось. Теперь, при следующем включении передатчика, не будет автоматически появляться окно сопряжения.
Осталась только одна процедура - настройка полетного контроллера CC3D. Для этого скачиваю OpenPilot и устанавливаю. Последняя версия с поддержкой CC3D - это 15.02.02, более новые версии выходят без поддержки CC3D. В качестве руководства использовал это видео:
Все получилось с первого раза. На этом этапе настройки передатчика были минимальны. Позже завершил настройку, вот что получилось для Walkera DEVO10 с прошивкой Deviation. Добавил экспоненты, расходы, привычный холд и три полетных режима. Квадрокоптер Eachine Racer 250 полетел сразу, без какого-либо шаманства. Ну, по крайней мере в комнате.
Удалось опробовать квадрокоптер на улице, причем в морозную ветреную погоду - отлично летает! И на прочность заодно испытали - была небольшая авария. Все осталось целым.
Это первый квадрокоптер 250-го класса, который мне удалось подробно рассмотреть и попробовать. Тема интересная, может соберусь и себе что-то подобное сделать. Но не для того, чтобы блинчиком полетать, это точно:)
Все получилось с первого раза. На этом этапе настройки передатчика были минимальны. Позже завершил настройку, вот что получилось для Walkera DEVO10 с прошивкой Deviation. Добавил экспоненты, расходы, привычный холд и три полетных режима. Квадрокоптер Eachine Racer 250 полетел сразу, без какого-либо шаманства. Ну, по крайней мере в комнате.
Удалось опробовать квадрокоптер на улице, причем в морозную ветреную погоду - отлично летает! И на прочность заодно испытали - была небольшая авария. Все осталось целым.
Это первый квадрокоптер 250-го класса, который мне удалось подробно рассмотреть и попробовать. Тема интересная, может соберусь и себе что-то подобное сделать. Но не для того, чтобы блинчиком полетать, это точно:)
Огромное спасибо за обзор! Заказал уже давно этот коптер , все никак не придет, жду.
ОтветитьУдалитьСмущает что нижняя часть платы из текстолита. Есть опасения что при падениях запросто она может повредится. Насколько она прочная?
Если коптер под рукой, можно ли узнать, влезут туда аккумуляторы по длине 105мм?
Там довольно прочный текстолит, почти 2мм толщиной. Если сильно не колошматить квадрик о планету, то ничего ему не будет. Аккумуляторы на 105мм если и влезут, то с натягом. Там как раз свободного места ровно 105мм.
Удалитькакой макс ширины можно вставить в него акум?
ОтветитьУдалитьМаксимум 38мм.
Удалитьзаказал 3 акк шириной по 43 мм как думаешь получится его туда как то присобачить может снизу как то?
УдалитьТолько снизу и получится. Даже если убрать вставку в раме, то между рогами все равно получается где-то 40мм.
Удалитьпривет еще раз. я до того как спросил заказал акумы они уже пришли к сожелению не обратил внимания что акк шириной 45мм как ты считаешь их можно как то снизу прекрипить или все таки нужно заказывать другие? (квадр еще не пришол)
УдалитьВ раме есть прорези под стяжку-липучку, так что снизу закрепить можно. Лишь бы хватило длины силовых проводов, чтобы до разъема дотянуть или придется удлинитель делать.
УдалитьА как насчет 4S акумов? Хотелось бы 4S, на 1500mAh, с пропами 5040. Регули выдержат? Они вроде там по 12А. Или поставить на 20А более именитые?
ОтветитьУдалитьЕсли будет возможность, то попробую и 4S. Пропы на 5040 уже едут. На регули вроде заявлено, что выдержат 4S, но я бы заменил на 20A.
УдалитьТакую защиту на моторы можно поставить на его лучи?
ОтветитьУдалитьhttp://www.banggood.com/Diatone-Universal-Motor-Protect-Landing-Gear-For-1806-2204-2PCS-Motors-p-1023212.html
И вообще она нужна?
Можно попробовать поставить, но только прямо под мотор, а не как на той же раме ZMR250 - с обратной стороны луча. Ножки придется обрезать. Защита нужна. Лично видел, чтоб бывает с моторами, когда квадрик по земле кувыркается. Можно вот такую защиту попробовать.
УдалитьMcHeli, да вот тоже наткнулся на те, которые по вашей ссылке, они подойдут точно. Те другие под ZMR, по форме не подойдут.
УдалитьЯ зачем ножки обрезать? Поставить как прослойку между мотором и лучом не получится? Как шурупы по длине, хватит?
McHeli, понял какие ножки вы имели ввиду - силиконовые ножки на защите. Закажу все таки их. Они вроде поплотнее выглядят, по-качественней, между мотором и лучом должны встать нормально. Там еще комплект шурупов идет.
УдалитьMcHeli, можете пояснить, для чего нужны разъемы на плате коптера J10 и J16?
ОтветитьУдалитьJ10 я так понимаю для управления подсветкой с пульта. Есть кабель комплектный, похоже для этого разъема. Его подключать на свободный канал приемника? А J16 для чего используется?
Еще вопрос по ESC. Конденсаторы для них вынесены на плату перед лучами, а в самом ESC его нет? Можно ли устанавливать другие ESC, где конденсатор впаян?
В моей версии конденсаторы для ESC жидкостные, (видимо чуть более старая версия). Насколько это критично и имеет ли смысл перепаивать на твердотельные?
Насчет разъемов еще не разбирался. Пока что отдал коптер владельцу. Чуть позже займусь, когда снова заберу. Умудрились спалить видеопередатчик, влага попала - нашли сугроб снега в Крыму:) Насчет регуляторов. У меня была версия без торчащих конденсаторов. По моему, нет смысла их менять, пока не сгорят.
УдалитьВидеопередатчик довольно чувствительный и капризный. Может его лучше поместить в термоусадку или изолировать изолентой (сделав отверстие под разъем антенны)? У меня он ощутимо греется, изоляция не помешает?
УдалитьАга, так с новым и поступим - закатаем в термоусадку. Он уже в пути.
УдалитьА как к этому квадрику правильно подобрать FPV-очки?
ОтветитьУдалитьВот эти подойдут? http://www.banggood.com/Eachine-VR-007-5_8G-40CH-HD-FPV-Goggles-Video-Glasses-4_3-Inch-With-7_4V-800mAh-Battery-p-960761.html
Или есть варианты поинтереснее?
Да подойдут любые. Они все могут принимать аналоговый сигнал видео-передатчика. Но у этого шлема низкое разрешение экрана, всего 480х272. Будет каша из пикселей на экране. Более-менее приемлемое разрешение есть у таких. А так подобные делают самостоятельно в два раза дешевле. Скоро буду делать другу и расскажу что и как. Комплектующие уже едут.
УдалитьСтал гуглить про этот квадр и смотрю, что многие ставят прошивку Libre Pilot, а не Open Pilot. Почему ты поставил именно Open Pilot?
ОтветитьУдалитьДруг пробовал LibrePilot - не понравилось, откатился на OpenPilot. Просто послушал его совета.
УдалитьПосмотрел я распиновку контроллера CC3D. Есть у него 6 out-каналов. Ну вот с 1 по 4 понятно, к ним подключены регули моторов. А зачем нужен 5 и 6 канал? Они несут какую-то функциональную нагрузку или нет?
ОтветитьУдалитьВот эту тему не копал. Можно наверное для чего-то использовать.
УдалитьВопрос возник потому, что думаю купить себе такой же квадрик, но поставить в него полетный контроллер EZNOV Neuron. Вот и интересно, как можно будет задействовать лишни каналы. Беглый поиск дал ответ - можно будет с аппы включать и выключать диоды.
УдалитьНедавно сгорела зарядка от этого квадра :) Из 3 ламп горит только одна. Разбор показал, что одна из трех микросхем контроля напряжения сгорела.
ОтветитьУдалитьМаркируется она так: верхняя строчка - 5056, нижняя 1530. Собственно микросхем 5056 довольно много на Али, но нижняя строчка различна: есть 1250, 1311, 1317, 1411, 1516, а микросхемы 1530 не могу найти.
McHeli, если вы ремонтировали ранее подобные з/у, подскажите: можно ли заменить сразу все 3 микросхемы вместо 5056/1530 на любые из вышеперечисленных, какие есть? И чем они все различаются? Или где можно заказать именно 5056/1530?
http://forum.rcdesign.ru/attachment.php?attachmentid=1164692&d=1453809453
Я брал такие микросхемы на Ebay, пока это было возможно. Нижняя строчка - по моему это просто серия. А сама микросхема называется AP5056. Так что можно брать любую. Но лучше вообще выкинуть эту зарядку и приобрести нормальную. Эта зарядка даже банки между собой не балансирует.
УдалитьОригинальный iMAX B6 mini уже в пути. Но пока его нет, хоть этим хотелось бы заряжать :) А iMAX B3 Pro от SkyRC как я понял тоже не балансирует банки между собой?
УдалитьНасчет нижней строчки, скорее всего вы правы! 1530 означает дату производства: 2015 год, 30 неделя.
УдалитьНасчет iMAX B3 Pro - это та же зарядка, только этикетка другая.
УдалитьМужики, отличная новость!
ОтветитьУдалитьШтатный регулятор оказался ни чем иным, как Emax 12A и он совершенно спокойно шьется на BLheli без танцев с бубном. После прошивки появляется поддержка OneShot125. Так же в 14-ой версии BLheli для этого регуля (прошивка для XP12A) появилась и поддержка damped light modе, на более ранних прошивках damped light mode не поддерживался.
Поподробнее новичку) Чем и как шить, мануальчик может где-нибудь?) Прошивку контроллера не надо менять на CF или BF? Можно остаться на ОР? И кстати какая у вас версия ER250? В v1 вроде совсем другие регули стоят, правда ее с октября не продают.
УдалитьПосле среднего краша треснула нога одного из конденсаторов на плате для ESC (ноги у них длинные по 1.5-2 см). Спаял ее, но для надежности захотелось сменить их на твердотельные, как в версии платы в обзоре. Судя по фото в обзоре, вот эти подойдут?
Удалитьru.aliexpress.com/item/20pcs-bag-25V-470UF-10-10-3MM-SMD-aluminum-electrolytic-capacitors/32260396832.html
В этом видео наглядно показано как прошить BLHeli https://www.youtube.com/watch?v=zykIenRCMZ4&feature=youtu.be
УдалитьЯ смогу их прошить через FDTI или нужна ардуина?
УдалитьТакой переходник в пути http://www.banggood.com/ru/FT232RL-FTDI-USB-To-TTL-Serial-Converter-Adapter-Module-For-Arduino-p-917226.html
Как подключать не подскажите?)
Забрал сегодня с почты свой квадрик.
ОтветитьУдалитьВ комплекте нет центральной карбоновой вставки, как в квадрике из обзора. Но в тоже время положили переходник для быстрого подключения приемника по PWM без вороха проводов (адаптер плюс шлейф)
У меня явно другая версия Eachine Racer 250! Задняя полоска диодов совсем другая. Кстати, а как менять цвета на задних диодах?
ОтветитьУдалитьЛибо просто переключателем щелкать - цвет меняется, либо, если подключить к отдельному каналу приемника, то тумблером на пульте щелкать так же, как переключателем.
УдалитьБлин! Т.е. при каждом включении всегда будет разный цвет? Не удобно как-то.
УдалитьКстати, а кто-нибудь понял, зачем нужен J16 у передней правой ноги?
У вас как минимум 5 версия (она идет без центральной пластины) или даже 6 версия, точно не знаю есть ли такая. Версии описаны здесь: http://wikirotors.com/index.php?title=Eachine_Racer_250#Versions
УдалитьВ этом обзоре судя по всему 4 версия, напишите отличия вашей. Кстати какие конденсаторы установлены на регулях?
Кстати получил защиту моторов отсюда: http://www.banggood.com/Diatone-Universal-Motor-Protect-Landing-Gear-For-1806-2204-2PCS-Motors-p-1023212.html
ОтветитьУдалитьОказались пластиковыми, а не силиконовыми :) Но это даже лучше, пластик хороший, прочный, похож на тот из чего сделаны лучи. Ноги у защиты пришлось отрезать старым паяльником и срезать заподлицо канцелярским ножом. Получилось здорово, встали как родные. Рекомендую :)
Фот ссылки на фото, не знаю как удобнее добавить.
http://s018.radikal.ru/i527/1602/f8/69764179c317.jpg
http://s018.radikal.ru/i510/1602/46/917966b8a38a.jpg
http://s019.radikal.ru/i635/1602/08/2733e4d4dbf3.jpg
http://s019.radikal.ru/i614/1602/51/27607d5f2673.jpg
http://s020.radikal.ru/i707/1602/07/eb745d3a249e.jpg
http://s020.radikal.ru/i702/1602/5f/4fe6b975a3c8.jpg
Судя по приведенной ссылке, у меня V5. Конденсаторы вынесены на основную плату, невысокие с маркировкой 470 25V UT
ОтветитьУдалитьПока что отличия визуальные следующие: 1) отсутствует центральная пластина рамы 2)другие задние диоды 3)В комплекте переходник для быстрого подключения приемника по PWM 4)Качество сборки низкое (претензии буквально к каждому прикрученному винтику, гаечке и стяжке)
Только сейчас заметил, что жидкостные конденсаторы устанавливаются всего на 230 микрофарад, в отличие от твердых на 470. Возможно именно поэтому при почти полном разряде акума, ниже 10 вольт, при посадки один или два движка отключаются и коптер заваливается на бок. Буду ставить твердые на 470 uF
УдалитьУспешно подключил приемник по PPM, очень удобно, как и с SBUS просто один проводок, даже отдельно питание заводить не нужно! Так же подключил провод включения диодов в 6-ой канал приемника (фактически PWM) и без проблем сработало включение/выключение диодов. Т.е. выходит, что в режиме PPM, применик так же дублирует сигналы и по PWM.
ОтветитьУдалитьБез проблем прошил регуляторы на BLHeli с помощью USB-свистка для прошивки MX10A - http://helicp.blogspot.com/2016/02/blheli-eachine-racer-250-oneshot125.html
ОтветитьУдалитьНаписал китайцам по поводу недостающей центральной части рамы, ограничивающей аккумулятор. На что они ответили, что во всех новых версиях Eachine Racer 250 это запчасти нет и не будет, типа новая модификация. И для фиксации аккумулятора используйте стяжку из комплекта и размещайте ее на центральной части рамы. Даже картинку прислали как эту стяжку использовать - http://s017.radikal.ru/i408/1602/b2/1dc5a03ece51.png Но стоит отметить, что они предложили мне выслать среднюю часть рамы, если уж мне так сильно она нужна )
ОтветитьУдалитьЦентральная пластина по сути нужна только для установки на нее приемника. Но не всякий приемник туда влезет. Я ставил стандартный FlySky FS-iA6, так вот он влез туда только когда я перевернул его штырями подключения каналов вниз.
Удалитьhttp://s018.radikal.ru/i516/1602/4c/979be44224ab.jpg
Любой другой приемник чуть больших размеров туда не поместится, поэтому смысла в этой пластине нет, только лишний вес. Да и засунуть туда приемник тоже не лучшее решение, так как сверху видеопередатчик не слабо греется, у меня между приемником и видеопередатчиком температура до 80 градусов достигает после 10 минут простоя включенного коптера. В полете, конечно, будет охлаждаться, но если на часок забыть и оставить коптер включенным, я думаю приемник не выживет.
Денис, зато туда замечательно поместится длинноусый сателлит. А так же эта площадка не дает аккумулятору упираться в CC3D. А без нее можно неудачно разместить аккум и он упирается в плату CC3D (
УдалитьЭто верно, без нее акум прямо в контроллер упирается. Если у вас есть стойки от центральной пластины, то на время можно самому вырезать небольшую плашку из текстолита (или пластика), сделать соответствующие отверстия в ней и прикрепить ее как ограничитель для акума вместо центральной пластины.
УдалитьСтоек, увы, в комплекте не было. Так что буду ждать пока пришлют бенггудовцы обещанную запчасть. Заодно заказал еще набор стоек разных размеров (тоже на бенггуде), так как планирую собрать себе Eachine 250 Falcon. А собирать буду сам, так как комплектация ARF меня не устраивает, хочу другие моторы и другие регули, да и камеру с передатчиком хочу другую )
УдалитьРама и правда хорошая, только вот проставки для моторов под 10 градусов не нравятся тем, что коптер постоянно будет тянуть вперед. Мне приглянулся LISAM KEEL-270 (не реклама) http://www.banggood.com/LISAM-KEEL-270-270mm-Carbon-Fiber-FPV-Racing-Drone-5_8G-40CH-Transmitter-700TVL-Camera-ARF-p-1024087.html
УдалитьРама удобная, тоже закрытая, да и моторы в стоке неплохие. Вот бы его кто-нибудь затестил :)
При наклоне движков вперед коптер вперед тянуть не будет. Он просто будет висеть на месте под углом. Насчет LISAM-270, я бы его взял, но у меня бзик на трикоптеры. Хочу из 250-й рамы трикоптер сделать. И там потребуются другие по мощности комплектующие.
УдалитьСаш, при наклоне моторов на 10 градусов, тянуть вперед будет постоянно. Во всяком случае об этом говорят в обзорах Eachine 250 Falcon. Но, если прошиться на прошивку Бориса - Betaflight, то в ней есть параметр, который указывает на наклон моторов относительно тушки. Если его задать верно, то дрейф вперед компенсируется мозгом.
УдалитьЧто же касается переделки 250-ки в трикоптер, то не вижу ничего сложного. Тот же Eachine Racer без труда можно переделать, например, с помощью вот этой детали - http://www.ebay.com/itm/271848971032?_trksid=p2057872.m2749.l2649&ssPageName=STRK%3AMEBIDX%3AIT Раму конечно доработать придется да и эту часть к третьей лапе приладить, но не вижу сурьезных проблем в этом вопросе.
Если в режиме стабилизации, то да, будет вперед тянуть. В акро - не будет. На самом деле этот наклон движков только для того, чтобы корпус коптера сильно носом вниз не наклонялся, чтобы на камеру не только землю было видно:) Я тут еще задумал хэдтрекер на одну ось и подвижную камеру вверх-вниз, чтобы компенсировать наклон коптера. Знаю, что в контроллере есть стабилизация в горизонт для камеры, но это не всегда удобно. И с пульта неудобно управлять - не успеешь. Головой проще всего.
УдалитьЗдравствуйте! Подскажите пожалуйста, а как с него без приобретения очков получить видео полета, желательно на карточку памяти?
ОтветитьУдалитьЕсли с курсовой камеры, то видео будет посредственного качества, низкого разрешения. Получить можно с помощью недорогого DRV-рекордера.
УдалитьРебят. Я конечно все понимаю но это пиз..ец... Я больше половины вообще не понял) хотел найти ответ чем отличается recer250 от falcon 250. Буду благодарен за внятный ответ).
ОтветитьУдалитьПосмотрите обзоры:
УдалитьRacer 250 - http://quad-copter.ru/obzor-eachine-racer-250.html
Falcon 250 - http://rc-video.ru/page/obzor-eachine-falcon-250-fpv-quadcopter.html
Всем привет! Купил DIY KIT этого квадрика. Сильно греется видеопередатчик. Передает или нет не знаю - пока не пришли очки. может кто знает он так и должен сильно греться? И второй вопрос после прошивки BetaFlight 3.0.0. не стартуют моторы. при подключении питания квадрик издает два бипа и тишина. программа показывает что мол моторы армятся, но сами моторы не заводятся. На стики не реагирует. Гуглил по теме но ничего внятного не нашел...
ОтветитьУдалитьДа, видеопередатчик будет сильно греться. Только нельзя его включать без антенны - сгорит! Нужно проверить в конфигураторе BF какой тип сигнала выставлен для моторов. Скорее всего Oneshot125, а регуляторы без перепрошивки в BLHeli его не поддерживают. Надо выставить PWM.
УдалитьСпасибо! Про передатчик понятно! Моторы завел и даже полетал по комнате :) решилось заливкой более ранней версии прошивки контроллера. Вообщем буду разбираться дальше :)
ОтветитьУдалитьДень добрый!Наконец-то мне пришол коптер walkera runner 250))),в комплекте с devo 7,но мне сразу же захотелось его сбиндить devo 10. нашел в сети файл ini для данного коптера закинул в передатчик devo 10 и очистил fixed Id также разумеется проверил выставлен ли протокол devo.Попробовал сбиндить все получилось коптер издал необходимые звук как при соединении с devo 7, но при процедуре арминга двигатели не разблокируются и вправо стик и влево стик пофиг ему вообще.Подскажите с чем может быть связана данная проблема?Может быть перенастроить полетный контроллер уже с devo10 в openpilot,но присутствует боязнь,что потеряю все существующие настройки в частности pid как его потом на глаз настраивать фиг его знает)))).Посоветуйте что нибудь пожалуйста)))).
ОтветитьУдалитьВ OpenPilot наверняка есть возможность сохранить текущую конфигурацию на компьютер. А потом уже можно и изменения делать. Просто в файле конфигурации для Devo10 может быть другой порядок каналов. Надо подключить к OpenPilot и посмотреть. Если что, то поменять.
УдалитьПонял, спасибо!
ОтветитьУдалить