Моторы URUAV SE0603 - перемаркированные Happymodel SE0603, отлично себя зарекомендовали в этом классе. Рама, скорее всего, так же спроектирована в Happymodel, так как впервые экземпляры появилась на happymodel.taobao.com. Чуть позже голубой и желтый варианты появились на Али и banggood.com, а потом ее стали продавать под брендом URUAV и BetaFPV. Полетный контроллер RacerStar CrazyBee F3 FR - самый лучший на сегодняшний день и с ним был уже знаком. Камера не играет большой роли - ее можно заменить. В общем, решил взять URUAV UR65 на обзор и проверить ресурс моторов и живучесть рамы.
Краткие характеристики URUAV UR65:
- База: 65мм
- Вес: 20.75 грамм
- Взлетный вес: 27.25 грамм
- Моторы: SE0603/17000kV
- Диаметр пропеллеров: 31мм
- Полетный контроллер: RacerStar CrazyBee F3
- Камера: 700TVL, NTSC
- Передатчик: 48 каналов, 25мВт
- Интегрированный приемник: FrSky D8
- Аккумулятор: LiHV 250мА/ч с PH2.0-разъемом, 6.5 грамм

Внутри коробки есть прямоугольная вставка из пористого материала с вырезами. Это гарантия того, что все доедет без повреждений.

В комплекте с квадриком обнаружились три аккумулятора на 250мА/ч, съемник для пропеллеров, два резиновых колечка неизвестного назначения, пять винтиков разного размера и диаметра, крестовая отвертка, инструкция, набор запасных пропеллеров и шестипортовое зарядное устройство.

Хайвольтные аккумуляторы на 250мА/ч не самой высокой токоотдачи. На этикетке написано 30/60C, а под этикеткой стоит маркировка только 30С:) Вес одного аккумулятора составляет 6.5 грамм, разъем PH2.0.

Время полета с такими аккумуляторами не будет превышать трех минут и проживут они недолго. После пары десятков полетов уже вздуются:) Ниже еще вернусь к теме питания квадрика.
Шестипортовое зарядное устройство является почти точной копией зарядника от Kingkong, только упаковано в более приличный корпус. Переключатели напряжения 4.2/4.35В и тока 0.2/0.6А расположены на привычных местах. Цифровой индикатор показывает входящее напряжение, напряжение на каждом из каналов зарядного устройства и напряжение на USB-разъеме. Можно заряжать аккумуляторы с PH2.0 и PH1.25-разъемом.

Для питания стокового зарядного устройства используется коннектор 5.5x2.1мм и XT60-разъем, а у зарядника от Kingkong стоит коннектор 5.5x2.5мм и тот же XT60. По функционалу устройства идентичны.

Зарядное устройство питается в диапазоне 6-25В и может заряжать аккумуляторы независимо друг от друга. Блок питания для такого устройства придется искать самостоятельно или подключать его к любому мощному аккумулятору, что очень удобно в местах, где нет доступа к электрической розетке.
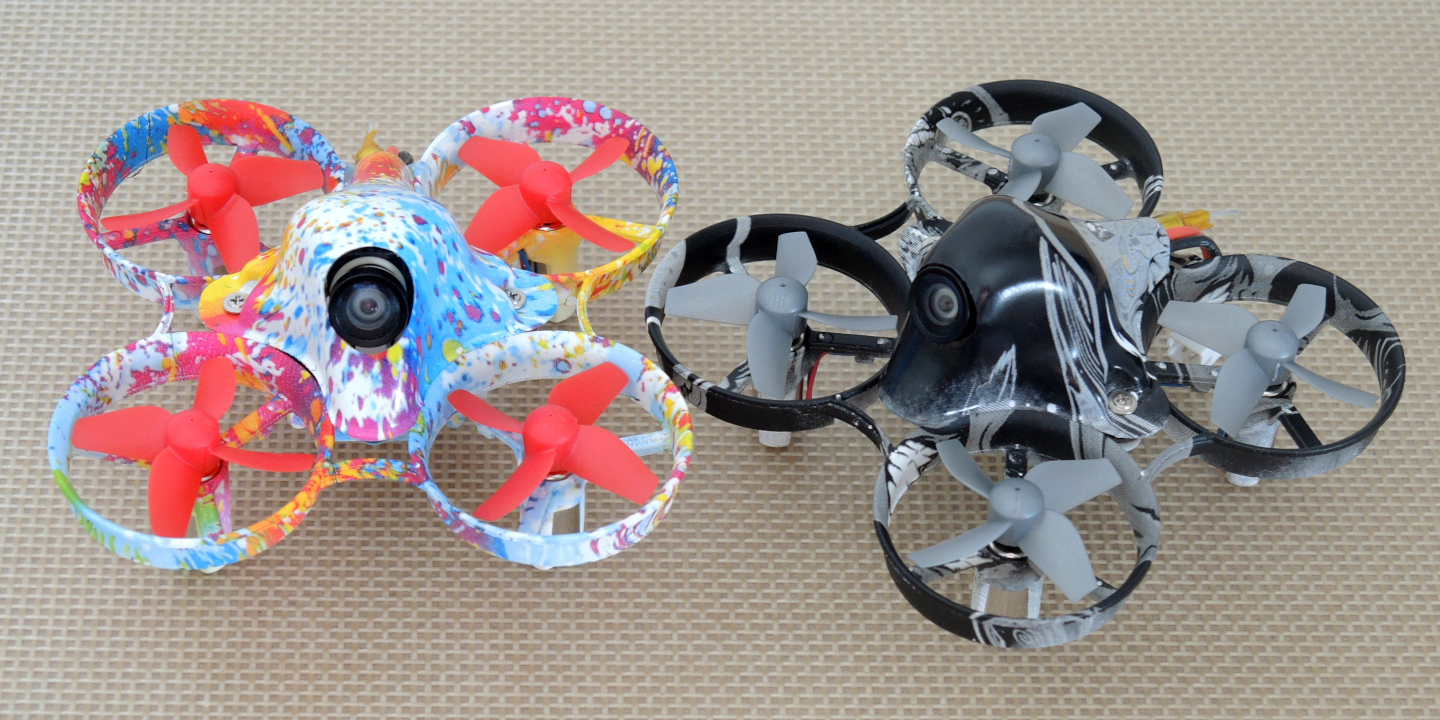
Теперь рассмотрим собственно сам квадрик URUAV UR65. Он построен на легкой раме с диагональю 65мм под стандартные пропеллеры диаметром 31мм.

Как писал выше, на квадрике стоят моторы Happymodel SE0603 на 17000kV, перемаркированные под бренд URUAV. Их вес 1.7 грамма.

Как видно из названия, диаметр статора у моторов 6мм, а высота статора 3мм. Снизу ротор фиксируется стопорным кольцом, что позволяет легко разобрать мотор в случае необходимости. Остается вопрос, зачем у мотора еще и сверху стопорное кольцо?

Ответ прост - чтобы вал не утапливался в ротор при замене пропеллеров. Очень многие 0603-моторы грешат этим из-за очень малой площади контакта ротора с валом. Раньше я уже разбирал мотор Happymodel SE0603.

На роторе стоят очень мощные магниты, зазор между ротором и статором минимальный. Основной вал диаметром 1.5мм вращается в латунных втулках. Для уменьшения трения и износа используются фторопластовые шайбы.

Да, в таком размере подшипники явно будут не к месту:) На выходе из ротора вал имеет диаметр 0.8мм, что отлично подойдет для любых пропеллеров тинивуповского формата под коллекторные 615/716 моторы. С этими моторами есть только один маленький нюанс. На одном из моторов ротор туго вращался и мотор не мог запуститься. Уже собирался разбирать мотор, но вовремя заметил, что провода в термоусадке, выходящие из мотора, задевают об ротор. Немного отогнул их и зафиксировал "китайскими соплями", то есть клеем B-7000.
Рама квадрика URUAV UR65 заслуживает отдельного внимания. Материал рамы очень упругий и в меру эластичный, самое то для квадрика такого класса!

Посадочные отверстия под моторы рассчитаны для Happymodel SE0603 и SunnySky R0703, хотя последние не рекомендуют использовать с пропеллерами диаметром 31мм - малая эффективность. Вес рамы всего 3.5 грамм! Рама просто идеальна, но есть один нюанс.

В контейнер под аккумуляторы можно вставить только узкие аккумуляторы на 250-260мА/ч. С ними время полета не будет превышать трех минут, разве что с BetaFPV на 300мА/ч получится три с половиной минуты. Соотношение веса квадрика к мощности моторов таково, что оптимальными будут аккумуляторы GNB 450мА/ч. Весят они 12.8 грамм, но и время полета с ними будет примерно четыре с половиной/пять минут - проверено! На месте производителя рам я бы задумался над версией с широким холдером под аккумуляторы, а пока придется докупить еще парочку таких рам и попробовать что-нибудь придумать, чтобы фиксировать широкие аккумуляторы.
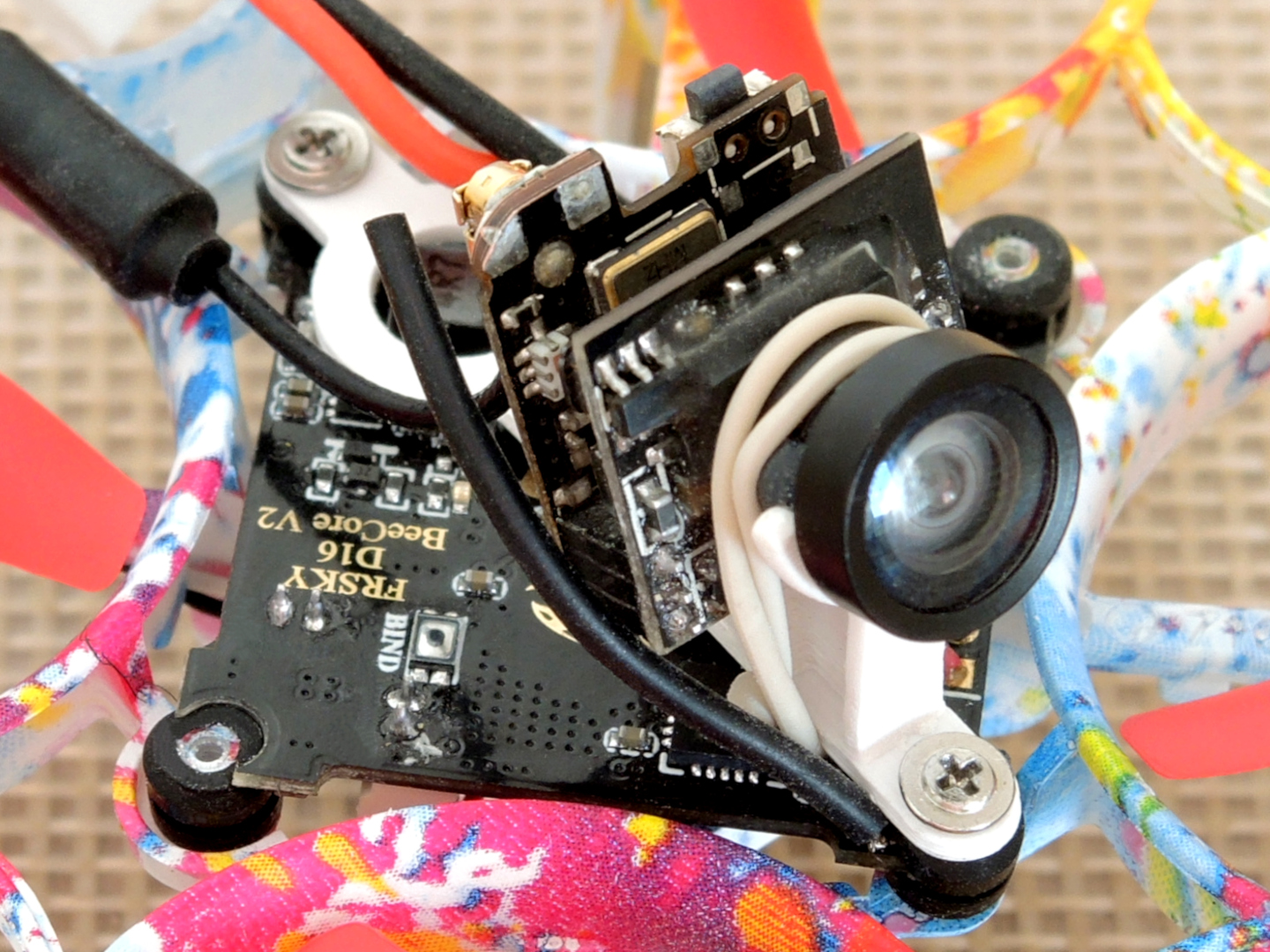
Следующий элемент квадрика - полетный контроллер RacerStar CrazyBee F3 FR. Его уже довелось испытать, но на тот момент прошивка BetaFlight работала не очень стабильно. Контроллер имеет на борту F3-процессор, MPU6000-гироскопы, BetaFlight OSD на чипе AT7456E, чип CC2500 на SPI-шине в качестве приемника, блок регуляторов с поддержкой DShot-протокола с максимальным током до 5А на мотор, и датчик тока.

Мне досталась обновленная версия полетного контроллера с дополнительными выводами UART3-порта. Схема подключения немного изменилась и теперь выглядит так:

UART3-порт будет очень кстати, так как все больше появляется микро-камер с передатчиком, управляемым через смарт-порт. Для примера, это Turbowing Cyclops Mini и Caddx Firefly. Последняя мне наиболее интересна, так как имеет сенсор стандартного размера в треть дюйма, а это значит, что картинка не будет мыльной как на большинстве тинивуповских камер. А пока что придется управлять передатчиком камеры через Pinio, как уже делал это раньше, например здесь. Просто бросил дополнительный фиолетовый провод с контакта кнопки управления передатчиком на контакт "BUZZ-" полетного контроллера.

Теперь смогу переключать сетку и каналы передатчика с тумблера на пульте.
Камера квадрика не очень, слишком яркая картинка. Хорошего изображение с камеры не стоит ожидать. Там и так-то по факту 520TVL, ибо матрица в четверть дюйма, да еще и передача идет в NTSC-формате, что дает всего 480 пикселей по вертикали.

Картинка очень мыльная и засвеченная. Для примера, картинка с наиболее удачной камеры в этом размере LST-S2.

Передатчик камеры без ухищрений - стандартные 48 каналов при мощности в 25мВт. Антенна - обычный диполь.
Канопа устроена интересно. При весе всего в 1.6 грамма, это еще и крепление камеры с изменяемым углом наклона.

Канопа состоит из двух частей. В переднюю плотно вставляется объектив камеры и камера фиксируется небольшим крючком на винтике. Затем крепление вставляется в основную часть и поджимается по бокам еще парой винтиков. Канопа фиксируется к раме в трех точках: по бокам и сзади. С задним креплением есть маленькая проблема - оно не плотное. Задняя часть канопы просто висит в воздухе без опоры.

Чтобы решить проблему пришлось сделать маленький пластиковый цилиндрик и подложить его между канопой и рамой.
Пришлось заменить силовые провода, так как они были ужасно короткие. Со стоковыми аккумуляторами еще ничего, а с какими-либо другими, у которых PH2.0-разъем не на проводах, их длины было недостаточно.

Удлинил провода до 50мм и поставил толщиной 24AWG - других не было.
По опыту знаю, что стоковые трехлопастные пропеллеры не очень эффективны. Сразу же заменил их на четырехлопастные от Eachine E011. С ними подрыв будет веселее и время полета больше.

После всех доработок вес квадрика URUAV UR65 увеличился до 21.2 грамм. Да, много, надо бы грамма на полтора уменьшить. Силовой провод можно сделать потоньше, убрать коннекторы моторов - 0.4 грамма, с канопой помудрить. Раньше же получилось сделать квадрик весом до двадцати грамм:) Ничего, приедут новые рамы - поэкспериментирую.
Буду пробовать новую версию прошивки BetaFlight-3.5.0. Для ее настройки надо скачать обновленную версию конфигуратора BetaFlight-10.4.0.

После прошивки сразу же запускаю конфигуратор BLHeli, где настраиваю направление вращения моторов. Был приятно удивлен от того, что в регуляторах уже была установлена последняя версия BLHeli_S-16.7 и направление вращения моторов было выбрано правильно.

Но я буду использовать реверсивное направление вращения, поэтому у всех регуляторов пришлось изменить опцию "Motor Direction" на "Reversed". Производитель полетного контроллера рекомендует установить параметр "Startup Power" на "1.00", иначе при запуске моторов велик шанс спалить регулятор. Сигнал маяка поднимаю на максимум - писк моторов и так еле слышно.
Настройка квадрика во многом будет повторять предыдущий вариант. В портах пока ничего не трогаю.

В основных настройках ставлю реверс моторов, протокол общения с регуляторами DShot300, минимальный газ поднимаю до 6.5%, выставляю частоту работы гироскопов 8/4кГц, отключаю акселерометры, выбираю протокол управления FRSKY_D, пока что оставляю включенными динамические фильтры и включаю пищалку на моторах. Можно было бы установить протокол работы с регуляторами и DShot600, но с регуляторами O-L-05 рекомендуется DShot300. DShot600 тоже будет работать, но возможны потери пакетов из-за не очень большой скорости работы процессоров регулятора.

После основных настроек делаю сопряжение квадрика с пультом, запустив в консоли следующую команду:
frsky_bind
В это же время включаю биндинг и в пульте в режиме D8 без телеметрии. Ну не работает нормально пока полетный контроллер RacerStar CrazyBee F3 с телеметрией в режиме D16! Видимо программистам еще немного придется пошаманить с прошивкой:)

После этого в консоли выполняю несколько команд, переназначающих ресурс пищалки на управление передатчиком камеры:
resource BEEPER 1 NONE
resource PINIO 1 C15
set pinio_box = 40,255,255,255
Переназначаю вывод "BUZZ-" полетного контроллера на PINIO. Позже в разделе режимов назначу тумблер на эту функцию.
В разделе питания поднимаю максимальное напряжение до 4.4В и уменьшаю минимальное напряжение аккумулятора, ибо под нагрузкой они значительно просаживаются.

В разделе приемника появился новый блок, позволяющий включить фильтрацию для сглаживания входящего сигнала с приемника. Пока что просто включаю эту опцию без всякой настройки.

Прошивка постоянно меняется. Теперь вместо PID-контроллера будет Feed Forward PID-контроллер! Пока FF-значения оставляю как есть - позже разберусь с ними. PID-ы мало отличаются от дефолтных. FF-transition немного увеличил для более плавного управления, угол в новом режиме Acro-Trainer ограничил до 15 градусов, остальное пока не трогал.

Приходится поднимать расходы до такого состояния, когда квадрик может вращаться по осям в районе 1000 градусов в секунду, чтобы перевороты происходили максимально быстро без значительной потери по высоте. Но тогда и точность управления уменьшится, придется добавлять значительную экспоненту. Вот от экспоненты я и хотел избавиться, потому что она получается настолько значительная, что управление квадриком становится очень далеким от линейного. Для этого в передатчике использую необычную кривую для осей pitch/roll.

В околонулевой зоне управление получается довольно точным, но стоит дернуть стик к краю, как происходит мгновенный переворот квадрика. Да, можно было бы не увеличивать RC Rate, а просто задрать Super Rate, но линейность управления в околонулевой зоне стика пропала бы.
В фильтрах делаю все, как и раньше - оставляю только LPF-фильтр на частоте 90Гц и D-Term-фильтр на частоте в 100Гц.

Можно значительно снизить нагрузку на процессор, отключив и динамические фильтры, но с ними мне больше понравилось, как летит квадрик.
В разделе режимов пришлось отказаться от собственно режимов полета - не хватило оставшихся четырех каналов. Да и не нужны они, все равно летаю только в акро-режиме. Хотел бы только добавить режим Acro-Trainer, чтобы ребенок на квадрике смог полетать, но для этого потребуется еще и акселерометры включать. В общем, обойдусь.

Оставшиеся четыре AUX-канала распределил на арминг, включение пищалки моторами, включение режима анти-черепаха и назначил тумблер для управления передатчиком камеры.
На OSD все данные вывел в уже привычных местах. Очень интересно наблюдать за каналом газа в начале и в конце полета, чтобы оценить степень просадки мощности.

Можно еще поэкспериментировать с параметрами RSSI. Дело в том, что RSSI считается не совсем правильно. В разделе телеметрии передатчика - одно значение, на OSD - другое. Рядом с пультом показывает 75-80%, на значительном удалении 55-60%. Ситуацию можно исправить, изменив в консоли следующий параметр:
set rssi_scale = 120
Тогда значения на OSD и в телеметрии пульта будут более-менее схожи.
Все, настройка закончена. Итоговый файл конфигурации можно скачать здесь.
Впечатления от первого запуска квадрика URUAV UR65 очень положительные. Моторы шуршат тихо-тихо. На видео это слышно. Они работают даже тише коллекторных! Квадрик управляется гораздо приятнее коллекторного собрата. Чувствуется более высокая мощность. Даже по стабильности выигрывает.
Из минусов, как и писал выше, только качество картинки с камеры и узкий холдер под аккумуляторы, в остальном - только плюсы! К прочности квадрика URUAV UR65 претензий нет. Рама и канопа выдержали все издевательства. Переживал за моторы, вернее за их валы, но после того, как сломал пару пропеллеров - перестал, все в норме. После примерно тридцати аккумуляторов звук от моторов не изменился, все такой же тихий и шуршащий. Поперечного люфта ротора нет, значит будут жить:)
Следующим этапом заменю камеру на Caddx Firefly и поставлю чуть более легкую канопу от Kingkong. Параллельно подумаю, как можно уменьшить вес квадрика. И да, приближается основное время для полетов на тинивупах, как говорится winter is coming:) Готовь тинивуп летом, а гоночный - зимой! Удачных полетов!