Технические характеристики XK X100 Dexterity:
- База: 100мм
- Вес: 28.2г
- Полетный вес: 36г
- Моторы: 8x20мм
- Диаметр винтов: 56мм
- Количество каналов управления: 6
- Протокол: Futaba S-FHSS
- Аккумулятор: 250мА/ч 1S 25C

Зарядное устройство даже не распаковывал. Если есть нормальная зарядка, то лучше ей заряжать. Как-то я не особо доверяю зарядкам, которые в USB подключаются.
Теперь поподробнее рассмотрю сам квадрокоптер. Начну с моторов.

На квадрокоптере стоят коллекторные моторы диаметром 8мм, длиной 20мм. Держатель мотора выполнен заодно с защитой пропеллера. Держатель с мотором просто защелкивается в отверстие на луче рамы квадрокоптера. Диаметр вала мотора 1мм. Пропеллеры симметричные, диаметром 56мм. Выполнены из довольно мягкого пластика. Лопасти очень тонкие. При встрече с препятствиями сразу же появляются зазубрины. Надо иметь некоторое количество в запасе. Моторы соединяются с платой на разъемах. Для замены мотора ничего паять не придется.
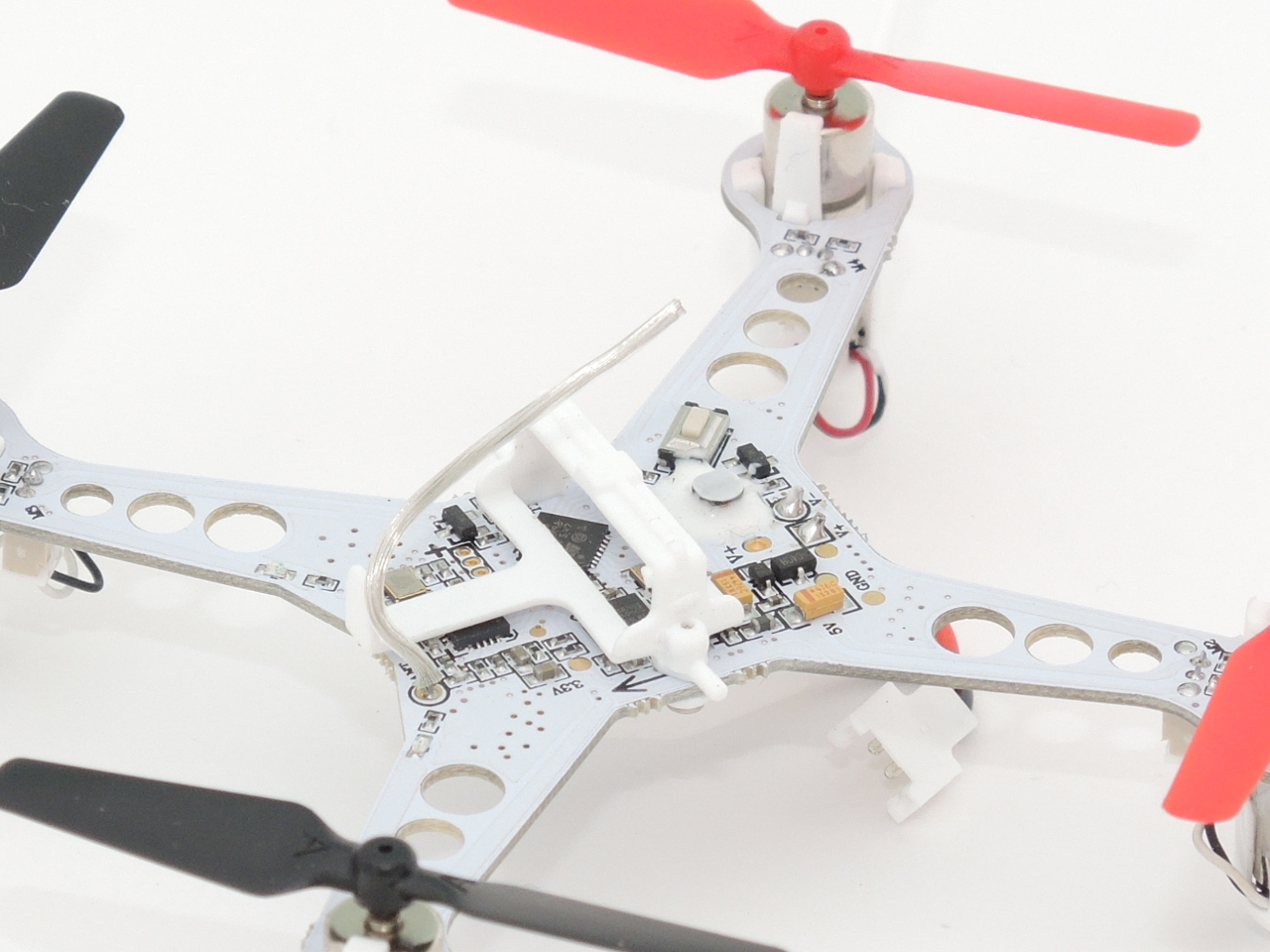
Рама квадрокоптера выполнена из текстолита. На ней сразу же сделана вся разводка и установлены все радиодетали. Может быть это и хорошее решение в плане сборки, но уж точно не лучшее решение в плане надежности. Любой изгиб рамы может привести к повреждению квадрокоптера. Лучи так же могут сломаться в районе отверстий, выполненных для облегчения.

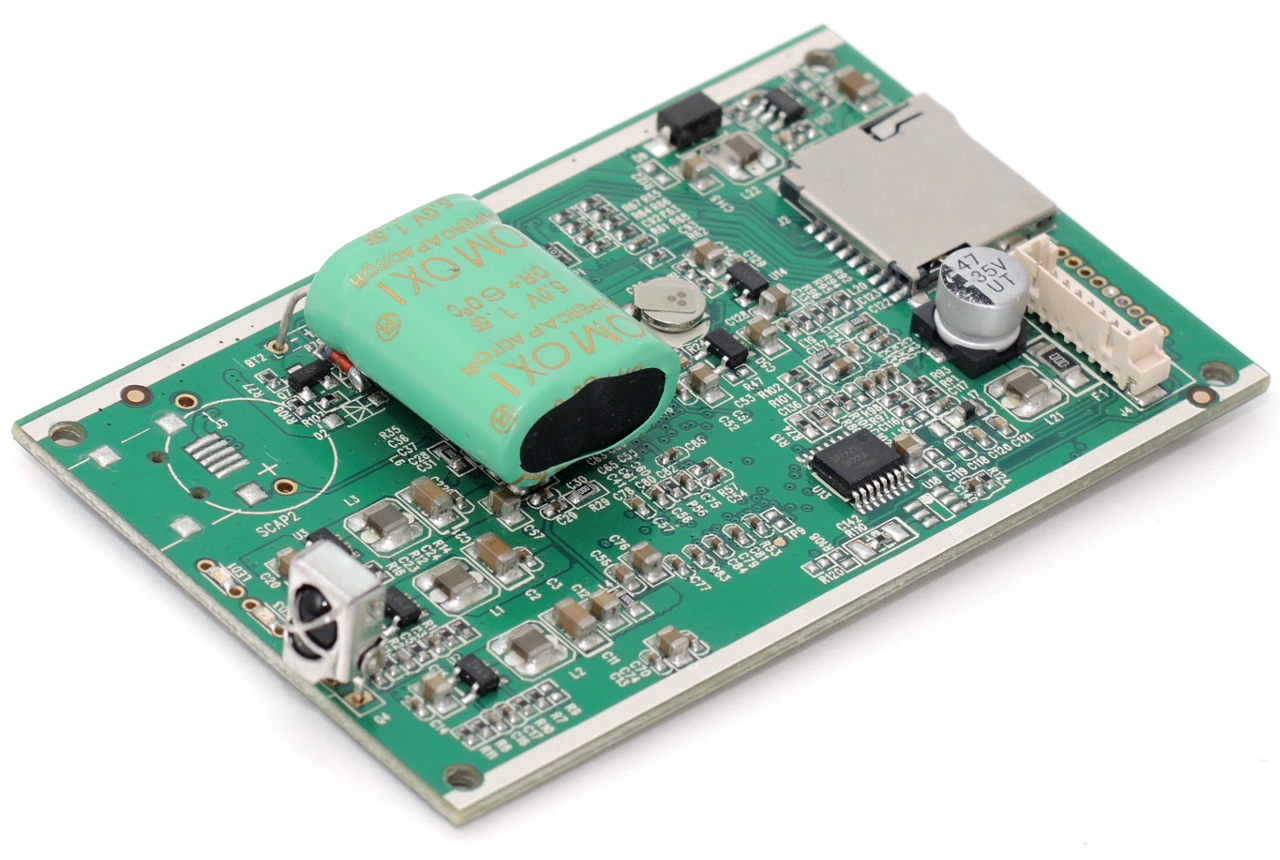
С верхней стороны установлен приемник на базе CC2500 и контроллер. Тут же расположена кнопка привязки квадрокоптера к передатчику.

С нижней стороны расположены силовые ключи. Одни из них мне удалось опознать, это SI2300DS на 5А. То есть, если захочется сделать вертолет максимально мощным, то можно заменить моторы на более мощные 8.5х20мм - ключи выдержат!
На раме бутербродом установлены всего две пластиковые детали. Сверху расположен держатель аккумулятора.
Кстати, туда отлично влезают аккумуляторы от XK K110 на 450мА/ч. Это на будущее, для полетов по FPV пригодится:)

Снизу расположен как бы киль:) На самом деле это просто защита от ударов. Но лучше бы от такого "паруса" избавиться. На улице в ветер он не добавит стабильности.
С конструкцией XK X100 Dexterity все более-менее понятно. Теперь посмотрим на стоковый пульт.
Пульт не имеет никаких настроек, очень простой. Стики выполнены на комбинированных блоках из пары резисторов и кнопки, то есть стики могут нажиматься. У стиков очень большая мертвая зона. Я попробовал летать с этим пультом в акро-режиме и это оказалось непросто. Позже попробовал с полноценным пультом - квадрокоптер летит как надо. Так что пульт подойдет только для начинающих и полетов в режиме стабилизации. С этим проблем нет.
Если нажать на левый стик, то это переключит расходы. Если нажать на правый - переключится режим полета со стабилизации на акро-режим.
На передней грани пульта имеются две кнопки. Правая кнопка ничего не переключает и при ее нажатии на экране пульта появляется рисунок видеокамеры. А вот с левой кнопкой нужно обращаться предельно осторожно! Она срабатывает только если квадрокоптер находится в акро-режиме. Кнопка включает режим 3D, когда моторы имеют возможность менять направление вращения прямо в полете. Все бы ничего, но быстро остановить моторы, если случилась авария, не получиться! Если опустить стик газа вниз, то моторы не остановятся, а на полной скорости впечатают квадрокоптер в планету! Я бы очень не рекомендовал пробовать режим 3D с этим пультом. С полноценным пультом такой проблемы нет.
Пульт работает от четырех пальчиковых батареек типа АА. И конечно же, не имеет выхода под симулятор.
Как я уже говорил, квадрокоптер XK X100 Dexterity управляется по шести каналам. Вот их порядок:
- Элероны.
- Элеватор.
- Газ.
- Руддер.
- Переключение режимов полета. -100 - режим стабилизации (6G), +100 - акро-режим.
- Переключатель направления вращения моторов. +100 - нормальное вращение, -100 - инверсное вращение.


При таких настройках газа нет скачка при переходе в режим 3D. А на канале "шага" кривая просто переключает направление вращения моторов. Так же взлет осуществляется с середины стика газа. Если этого не сделать, то при переходе из акро-режима в режим 3D квадрокоптер просто рухнет вниз! При значении газа -100 моторы останавливаются независимо от выбранного режима. Это значение нужно использовать для тумблера Hold. Для примера приведу свой файл конфигурации для DEVO10.
Кстати, случайно нашел режим калибровки акселерометров. Для этого нужно поставить включенный квадрокоптер на ровную поверхность. Затем на пульте одновременно сдвинуть левый стик в левый нижний угол, а правый стик в правый нижний угол. Квадрокоптер начнет мигать огнями. Как закончит, значит калибровка завершена.
Теперь можно посмотреть как летает XK X100 Dexterity:
В акро-режиме ветер ему не страшен. Но если в 3D-режиме ставить квадрокоптер плоскостью роторов по ветру, то будет сдувать. Чувствительность гироскопов слегка высоковата. Это видно по раскачиванию квадрокоптера при порывах ветка. XK X100 Dexterity легко тянет аккумуляторы от XK K110 на 450мА/ч. С ними мне даже больше понравилось.
В 3D режиме XK X100 Dexterity без проблем делает флипы-роллы. Возможно получится сделать даже тик-так. А вот пирофлип сделать не удалось. Квадрокоптер очень медленно поворачивается по руддеру. Относительно вертолета конечно:) Если потренироваться, то летать можно очень компактно даже в помещении.
Далее основное блюдо - установка камеры и полеты по FPV! Использовал те же самые комплектующие, что и в прошлый раз. Крепление аккумулятора перенес вниз, а сверху разместил блок FPV.

Камера 600TVL, передатчик на 200мА и уменьшенный степап на 5В. Все это разместил на пластине из пары слоев потолочки. Между слоями проложил по бокам карбоновый пруток на 1мм для жесткости. Степап на 5В уменьшил как мог до веса в один грамм. Тяжеловат, надо бы Pololu U1V10F5, но мне такой не купить - санкции-с:) Рисунки пластин не прикладываю, тут каждый сам может придумать, как ему больше понравится. Я вынес камеру вперед, чтобы пропеллеры перед ней не мелькали. А переднюю центровку компенсировал аккумулятором на 450мА/ч.
Пропеллеры поставил обычные, на 56мм. С ними тяги больше и они более прочные. Если аппарат приживется, то заменю моторы на более мощные и трехлопастные пропеллеры, про которые писал выше.
Вес без аккумулятора получился 33.2 грамма, что на 5 грамм тяжелее стока. С аккумулятором от XK K110 на 450мА/ч вес получился 54.2 грамма.
Аппарат получился исключительно для помещений или полетов в безветренную погоду. Попробовал полетать на улице в ветер - раскачивает квадрокоптер, слишком перестабилизированный. Попробовал регулировать значение по пятому каналу - не помогает, чувствительность гироскопа не изменяется. Крепление камеры так же надо переделывать. Во время падения лопасть одного переднего пропеллера подогнулась и разрезала крепление камеры.
Еще один момент с управлением. У меня никак не получалось плавно лететь вперед. Либо быстро летит, либо медленно. Дело оказалось в экспонентах. Вернее у квадрокоптера имеются встроенные экспоненты, так что на пульте экспоненты лучше поставить в ноль. Если квадрокоптер кажется очень резвым в акро-режиме, то лучше убрать расходы, но не делать экспоненты.
Очень удивило качество изображения с камеры. Помехи были, но такие незначительные, не сравнить с тем, что было на прошлом квадрокоптере. Но все таки надо уменьшать угол обзора камеры. В таком размере очень тяжело понять скорость полета из-за большого угла камеры.
На этом все. Удачных полетов!