Решил продолжить модифицировать микро-франкен-хели V120 DZero 2S. Первая презентация была здесь. Из-за проблем с вибрациями, пришлось переделать половину вертолета.
Сначала я установил металлические детали головы основного ротора от модели Solo Pro 180 3D. Это цапфы, хаб, вал, тарелка автомата перекоса. Все детали очень высокого качества. Межлопастный вал остался от V120D02S - он более прочный. Так как основной вал стал диаметром 3мм, то пришлось заменить подшипники в раме вертолета с 6x2.5 на 6x3 и подложить под них по паре тонких шайб 6x4. Отверстие в основной шестерне немного расточил круглым надфилем под новый вал.
Пин антивращателя новой тарелки автомата перекоса находится с другой стороны, так что пришлось придумать новую скобу антивращателя. Это было проще, чем пытаться переставить пин антивращателя на самой тарелке.
Новая скоба антивращателя сделана из обломка карбоновой лопасти от большого вертолета по проверенной технологии и закреплена на переднем сервоприводе.
Первые полеты не дали каких либо положительных результатов. Даже с новой головой, отличными высококачественными подшипниками, новой шестерней и отбалансированными лопастями на максимальных оборотах при нулевом шаге возникали резонансные вибрации, которые сводили с ума гироскопы на плате управления. Признаюсь честно, я так и не смог найти их причину. Почему именно при нулевом шаге?... Если у кого-то будут идеи - делитесь в комментариях.
Поэтому я попробовал решить проблему с другой стороны и воспользовался "костылем" - заменил плату WLToys V977 на плату управления от вертолета XK K110. Как я рассказывал раньше, эта плата имеет раздельные каналы управления шагом и газом. Точки для получения сигнала для регуляторов находятся точно там же, где и на плате WLToys V977.
С новой платой все равно при максимальном газе из-за вибраций гироскопы вели себя неадекватно и вертолет падал. Но стоило немного опустить полку газа в режиме Idle Up до 95-96%, как вертолет полетел. И полетел очень неплохо! Даже хвост стал работать вполне прилично. Я все время боялся, что его сорвет. Ничего подобного! Впрочем, смотрите сами:
Ну что же, считаю эксперимент по созданию вертолета 120-го размера, с питанием от двухбаночного аккумулятора, почти состоявшимся. Полученный опыт очень пригодится при доведении до ума нового вертолета XK K120.
Вот уже полгода идет работа над новой моделью вертолета 120-го класса. Основная масса времени пришлась на ожидание необходимых комплектующих, а вертолет был собран за пару дней. В итоге получился вертолет V120 DZero 2S. Это симбиоз моделей Walkera V120D02S, HiSky HCP100S и WLToys V977, с питанием от двухбаночного аккумулятора.
Система стабилизации взята от WLToys V977 новой версии с регулировкой шага. Блок регуляторов и хвостовой двигатель с держателем позаимствован от вертолета HiSky HCP100S. Основной двигатель - Spin 8000kV с пиньеном 9T. Почти все остальное от Walkera V120D02S.
Блок стабилизации и сервоприводы требуют питания от напряжения не более 4.2 вольт. Для их питания установлен отдельный стабилизатор с возможностью регулировки напряжения. Он расположен с нижней стороны площадки.
Чтобы сделать единый блок стабилизации и регуляторов, так же, как было у модели HiSky HCP100S, пришлось изготовить переходную пластинку, на которую установлен блок стабилизации от WLToys V977.
Пластинка изготовлена по методу, описанному ранее. Сама пластинка устанавливается над блоком регуляторов так же, как до этого стоял блок стабилизации HiSky HCP100S. Плата стабилизации от WLToys V977 приклеена к пластинке на два слоя антивибрационной прокладки.
Сигналы для регуляторов взяты со входов транзисторов. Это удобнее, так как при старте можно взводить сразу оба регулятора.
Два задних сервопривода пришлось инвертировать, то есть в каждом поменять местами провода от мотора и от резистора. А вот передний сервопривод остался без изменений.
Пробовал устанавливать различные пиньоны на 9-10-11 зубьев. Наиболее подходящий - на 9T. С ним и хвост ведет себя хорошо, и мощности достаточно.
Хвостовую балку изначально изготовил удлиненную. Но потом от нее отказался - хвост стало перекручивать. Мощности хвостового двигателя от HiSky HCP100S было с избытком. Поэтому использовал стоковую балку от Walkera V120D02S. Подкосы самодельные удлиненные. Держатель подкосов от Blade 130X - он и по прочности и по удобству установки мне больше понравился.
Отдельный момент - установка качалок. Сначала я установил шарики на качалках на самые ближние отверстия, так как ход качалок очень большой. Но при этом в крайнем нижнем положении тяги от качалок к тарелке автомата перекоса задевали за корпус сервопривода. Пришлось переставить шарики на средние отверстия и сильно уменьшить расходы в пульте.
Планировалось использовать узкие аккумуляторы от HiSky HCP100S. Поэтому шасси от Walkera V120D02S были слегка модифицированы. С помощью паяльного фена батарейный отсек был немного деформирован так, чтобы аккумулятор легко в нем помещался.
Первые испытания выявили резонансные вибрации на высоких оборотах. Из-за этого плата стабилизации сходила с ума и вертолет заваливало на бок. Позже выяснилось, что причиной вибраций была основная шестерня. Она имела слегка эллипсовидную форму.
Пока что модель не завершена, так как снова приходится ждать запасных частей. Но уже есть первое видео полета.
Если получиться победить вибрации, то в дальнейшем вертолет будет модифицирован так, чтобы можно было использовать любые интересные аккумуляторы. Продолжение следует!
Не удержался и решил испытать получившийся блок Tarot ZYX-S с OrangeRX R100, установив его на видавший виды Solo Pro 180 3G, сохранив питание вертолета от одной банки. Установка не вызвала проблем, блок приклеил на липучку, идущую в комплекте с Tarot ZYX-S. Сателлит в блоке был уже сопряжен с моим передатчиком. В первый канал идет левый сервопривод, во второй - правый, в третий - задний, а в четвертый - хвостовой, как и рекомендует руководство для Tarot ZYX-S.
При настройке заметил, что все работает, а двигатель стартовать отказывается. Причем родной ESC нормально инициализировался, но на изменения канала газа не реагировал. Его калибровка не помогла. Не стал глубоко вникать и заменил родной ESC на XP12A.
Но и тут я поймал проблему. Подав питание с BEC регулятора на блок FBL, я получил нестабильную работу блока, дрожание сервоприводов, а сателлит миганием стал сигнализировать о проблемах с питанием. Пришлось подать питание на блок FBL в обход BEC, тогда все пришло в норму.
Следующим шагом я стал добиваться стабильного старта двигателя. Регулятор XP12A уже был прошит прошивкой BLHeli, оставалось сделать его настройку. Используя программу BLHeli Setup, я отключил гувернер, увеличил в полтора раза стартовый импульс и частоту запуска. Двигатель стал отлично стартовать.
Позже, после настройки блока FBL, я сделал калибровку максимального и минимального значения на канале газа. Что не очень понравилось в работе XP12A с BLHeli - некоторая инертность реакции на изменение газа. Хотя это не критично, все равно летать предполагается с гувернером.
Для настройки Tarot ZYX-S в передатчике сделал отдельный профиль, где шесть каналов управляются линейно. Поскольку у меня DEVO10 c Deviation, есть возможность сделать все каналы независимыми, назначив каналы AUX и шаг на крутилки. Благодаря этому профилю я смог настроить в блоке FBL расходы и центральные точки.
Я немного уклонился от инструкции по настройке Tarot ZYX-S. Если следовать инструкции, то канал элеронов, элеватор и руддер необходимо инвертировать в передатчике, чтобы на закладке Monitor все работало по инструкции. Но при таком раскладе на последнем шаге настройки, при проверке пирокомпенсации, FBL по элеватору будет работать назад, в противоположную сторону. А вот если предыдущие три канала оставить в нормале, а инвертировать в передатчике только канал шага, тогда все будет в порядке.
Не буду описывать весь процесс первоначальной настройки, там все довольно примитивно. Остановлюсь только на некоторых особенностях.
На закладке Receiver я выбрал тип приемника DSM2-1. Только с этим значением все каналы работали адекватно.
Чтобы добиться хода ползунков до 100% на вкладке Monitor, пришлось задать на все каналы Scale 103% в передатчике.
Затем стал выравнивать тарелку по самодельному левелеру. Tarot ZYX-S не включает модуль стабилизации, если включить модель без передатчика. При этом хвостовой сервопривод встает в нулевое положение, а сервоприводы тарелки встают в положение, заданное для процедуры Failsafe в сателлите. Этим и можно воспользоваться. Нужно выставить в передатчике нулевое значение шага и нажать кнопку Set Failsafe на закладке Monitor. Потом нажать Finish, выключить модель, выключить передатчик и включить модель. Сервоприводы тарелки встанут в среднее положение, гироскопы работать не будут. В таком состоянии можно выставить тягами нулевой шаг и перпендикулярность тарелки. А так же выставить предкомпенсацию для хвостового ротора. Очень удобно.
Уровень наклона тарелки и ход общего шага выставил в 60. Больше не хватает высоты щели антивращателя. Пин антивращателя упирается в крайние точки.
А теперь приведу два скриншота, с главного окна программы настройки Tarot ZYX-S, и с окна, появляющегося при нажатии кнопки Advanced Menu. И немного расскажу, что и где крутить, чтобы все работало. Сначала нужно почитать здесь. Там в краткой форме рассказано, что за что отвечает. Но в основном все постигалось методом научного тыка на основе инструкции с описанием параметров и обрывков информации в сети.
Сначала нужно выставить Tail Rotor Gain в 100%, а в Advanced Menu выставить AUX channel function в значение Switch yaw gain. Это позволит регулировать чувствительность хвостового гироскопа из передатчика.
Затем я выставил Agility и Yaw Rate в максимальное значение. Это обеспечит максимальное ускорение работы сервоприводов. Хотя сейчас склоняюсь к тому, чтобы Agility немного уменьшить. А то при рекомендованных экспонентах в 40% в околонулевой зоне стика рулится отлично, а чуть дернул стик сильнее - сервы тут же стремятся в крайние положения.
Параметр Burst Coefficient появился в четвертой версии прошивки и по умолчанию стоит в 20. Пока убрал его до нуля.
Roll Gain и Pitch Gain выставил в 30 и уже все остальные настройки делал на их основе. Меньшее значение даст меньшую стабильность.
В Advanced Menu оставил почти все, как при пресете 3D Soft. Можно смело уменьшать I Gain для основного ротора, пока я поставил максимальное значение. А вот избежать тряски ротора удалось только уменьшением D Gain до самого нуля. При значении выше 3 уже начинает трясти ротор.
Хвост и на значениях из пресета ведет себя отлично. В передатчике чувствительность гироскопа выставлена в +/-23. У меня хвост все таки немного дрожит, но это связано с изношенным сервоприводом. Он и на родной FBL так же дрожал. Зато ни увода хвоста при резкой работе шагом, ни поползновений, ничего нет. Это я еще компенсацию по шагу не выставлял.
При проверке блока FBL выявилась ожидаемая проблема. При просадке напряжения ниже примерно 3.9 вольт, Tarot XYZ-S начинает вести себя неадекватно. Стабилизатор в блоке не справляется и начинаются проблемы с питанием. Доходило до того, что сателлит терял питание и включал режим Failsafe. А сама FBL начинает заваливать тарелку и трясти сервоприводами. При питании в 2S, как и планировалось, этой проблемы не будет. Лишь бы хватило BEC на 1A, встроенного в XP12A. А то либо придется докупать внешний BEC на 3A, и встроенный таскать балластом, либо ставить Turnigy Plush 12amp с BEC на 2A.
Для полетов я использовал другой профиль передатчика. Его можно скачать здесь.
Вот вроде и все, что хотелось рассказать. А вот так оно летает:
Сейчас весь в раздумьях, идти в поле испытывать работу 3D, или разобрать. С одной стороны время полета нужно уменьшать до трех минут, а с другой стороны в поле пока настройки не исправишь. У ноутбука аккумулятор давно умер, а какой-нибудь девайс с Android вряд ли получится отжать у знакомых хоть на пару часов.
Общий вывод сделать все равно можно - оно летает! И что-то мне подсказывает, что если сделать грамотные настройки, то модель полетит просто замечательно. Так что цель эксперимента считаю достигнутой.
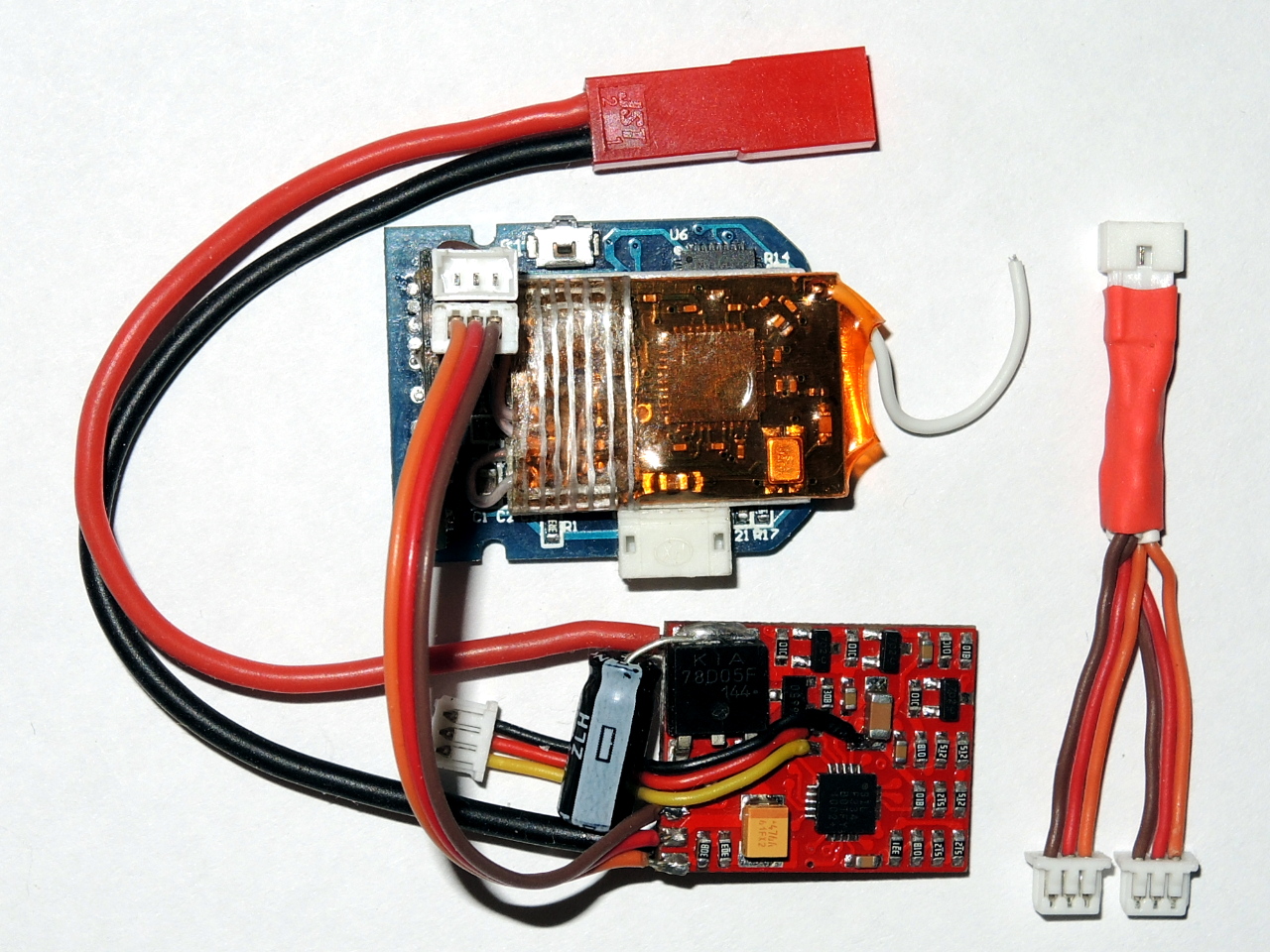
Дошли руки доделать блок электроники. В итоге получился блок весом 5.8 грамм, габаритами 23x32x8.5мм, плотный такой, добротный. Так прямо и просится на модель. Если будет время, то испытаю его на SP180.
Все таки я пошел по сложному пути, решив выпаять с Tarot ZYX-S плату разъемов и заменить ее на самодельную плату с разъемами JST1.25. Так же я перенес индикацию с сателлита на лицевую сторону блока.
А теперь по порядку. Сначала я установил соответствие выводов на плате разъемов с выводами на основной плате Tarot ZYX-S. Получилось следующее.
Если смотреть на основную плату Tarot ZYX-S со стороны главного чипа и индикаторов, при этом так, чтобы плата с разъемами была вверху, а индикаторы внизу, то получается такая картина.
Затем я аккуратно собрал припой с выводов платы разъемов с помощью оплетки с флюсом и извлек плату.
Я нарисовал в векторном редакторе Inkscape новую плату разъемов и изготовил ее по ЛУТ-технологии. Плата получилась двухсторонняя, толщиной 1мм. Поскольку у меня не нашлось текстолита такой толщины, то я изготовил две стороны платы на одностороннем текстолите толщиной 0.5мм, а затем склеил половинки эпоксидной смолой и обработал.
Отверстия сверлил сверлом 0.5мм, а по краям, где будут выводы проводов, расширил до 0.6мм. С одного края сделал выводы для общего провода и входного сигнала с сателлита, а с другой стороны - общий и плюсовой, на всякий случай, мало ли еще что подпаять захочется. Файл для печати платы на бумаге можно скачать здесь. На плате есть восемь переходов. На рисунке они обозначены черным цветом. Переходы сделал с помощью проволочки с выводов ненужного резистора.
Художник из меня еще тот, но думаю смысл понятен. На сателлит с платы идут два провода - общий и сигнальный. Плюсовой провод для питания сателлита я подпаивал к выходу стабилизатора на самой плате FBL, как и писал ранее.
После изготовления платы я впаял в нее разъемы JST1.25 и прилепил плату на ее родное место к основной плате FBL.
Далее идет небольшая переделка сателлита. Сначала я заменил антенну на обрезок провода МГТФ длинной 31мм. Родная антенна в процессе моих экспериментов успела надломиться около места пайки.
Я захотел вывести индикацию сателлита рядом с индикаторами Tarot ZYX-S. Для этого изготовил маленькую платку, которую прилепил на двухсторонний скотч к блоку FBL на свободное место справа. Рисунок платки для печати здесь. Затем я удалил светодиод с сателлита и вместо него припаял два проводка, идущие к этой маленькой платке. А на платку посадил новый белый светодиод, выдернутый от подсветки клавиатуры старого мертвого телефона. Хотел выдернуть зеленый светодиод от сгоревшей платы Solo Pro, но не получилось - повредил его.
Настала очередь прилепить сателлит к плате FBL. Я сделал это с помощью двух слоев подкладки, которая шла в комплекте с Tarot ZYX-S. В итоге вот что получилось:
Я еще немного налепил обрезков этой же подкладки по бокам блока так, чтобы получился цельный кирпичик. К сожалению нет фотографий полностью облепленного блока, так хотелось его побыстрее в кофр упаковать.
Про кофр. Я рассматривал несколько вариантов материала для кофра, но в итоге остановился на самом примитивном и, как оказалось, самом удобном. Это обычная пленка для печати на принтере. На ней и рисунок можно напечатать и режется модельным ножом она отлично, в месте сгиба не надламывается. А чтобы надписи не стирались, я печатал кофр в зеркальном отражении, а изнутри оклеивал обычной белой непрозрачной пленкой для мебели.
Сначала я спроектировал в Inkscape рисунок будущего кофра. С пятой попытки получилось вот так:
Кофр сложный, целью было полностью упаковать электронику. Процесс изготовления я начинал с распечатки рисунка кофра на пленке. Для этого я разрезал пленку формата А4 на три равные части и на одной из них печатал. Вот файл для печати. Затем я подготавливал пленку для оклейки. Чтобы отверстия под индикаторы получились идеально ровными, я пробивал их на пленке для оклейки стальной трубочкой диаметром 2мм (полая стальная вязальная спица). Для этого в файле для печати есть несколько блоков с кружочками. Такой блок вырезается, приклеивается к пленке для оклейки на двухсторонний скотч и пробиваются отверстия по шаблону. Затем шаблон убирается и остаются четыре ровных отверстия.
Затем пленка для оклейки фиксируется клеевой стороной вверх и снимается защитный слой. Лучше сразу не склеивать обе пленки, а сначала обработать клеевой слой из пульверизатора обычной водой. Тогда уже можно совмещать обе пленки. Так не будет между пленками воздушных пузырей и внешний вид будет отличным.
Совместив обе пленки, я аккуратно все разглаживал, а затем вырезал по стальной линейке модельным ножом. Отверстия под антенну пробиваются уже после склейки двух пленок. На рисунке пунктиром обозначены места надреза пленки для оклейки. В итоге получается примерно так:
Здесь я уже начал сгибать кофр, но потом спохватился и сделал фотографию. Место под кнопку блока FBL аккуратно продавливается скругленным предметом так, чтобы образовался небольшой выступ. Для сгибания не требуется надрезать место сгиба. Все сгибается аккуратно просто руками и ногтем разглаживаются линии сгиба.
На выкройке есть две защелки. Сначала защелкивается передняя защелка, потом вставляется блок электроники. Антенна сразу попадает в два отверстия на кофре. Потом я нанес на плату сателлита двухсторонний скотч, чтобы блок надежно держался в кофре. Затем защелкнул нижнюю защелку. Это самое сложное. Нижняя крышка своей кромкой подворачивается внутрь так, чтобы образовать сцепку с задней стенкой. Предварительно на нижнюю крышку я тоже нанес двухсторонний скотч.
Разобрать такой кофр будет крайне сложно. Надеюсь, что это не потребуется. Для проверки подключил блок к регулятору и дал питание - все заработало.
Блок получился знатный, аж самому нравится. Это было последним препятствием для начала процесса проектирования рамы, так как было неясно как будет стоять блок и где у него будут выводы.
Давно хотелось поставить на модель алюминиевый слайдер. Из того, что есть в продаже от других моделей, ни один не подходит. Максимально близко подходил только слайдер Xtreme W46015, но у него шарик очень маленький. Я все таки рискнул купить его, в надежде что нибудь придумать.
Собственно придумывать-то было особо нечего, либо уменьшать отверстие в поводке, либо увеличивать шарик на слайдере. Я выбрал второе.
Сначала я оклеил корпус слайдера под шариком скотчем, чтобы надфиль не царапал его. Потом аккуратно обточил кругом шарик надфилем, чтобы на его месте получилось продолжение штырька. Штырек должен быть диаметром 0.9мм. Чтобы довести его до круглого состояния, я использовал цангу, поджатую до 0.9мм. Сверху потихоньку накручивал ее, так чтобы получился ровный штырек, а от шарика ничего не осталось. В итоге получился длинный штырек.
Шарик я изготовил из кусочка алюминиевой вязальной спицы диаметром 2мм. Алюминиевые спицы имеют одну особенность, за которую я зацепился - это миниатюрное отверстие вдоль всей длины спицы. Его можно использовать, как направляющую.
Я отрезал заготовку длинной 12мм., зажал ее в дремель и надфилем выточил шарик. Примерил шарик на предмет защелкивания в поводке и отшлифовал его. Шейку под шариком старался сделать не сильно тонкой.
Потом вручную высверлил отверстие внутри заготовки почти на всю ее длину, но так, чтобы сверло не вышло из шарика. Сверлил, понятное дело, с противоположной от шарика стороны. Сначала прошел сверлом 0.7мм., потом 0.8мм., потом 0.9мм. В итоге отверстие в начале получилось несколько разбитым, поэтому я и делал достаточно большую заготовку, заранее зная о том, что так получится.
Оставалось только отрезать шарик от заготовки, что я и сделал, используя дремель. Высота шарика с шейкой получилась 2.5мм. Затем я посадил шарик на штырек слайдера на сильный зеленый локтайт. В итоге, вот что получилось:
Установка линков так же не вызвала проблем. Пины у слайдера на 1.2мм., так что в линках пришлось расширить отверстия. Пришлось пройтись сверлом и по отверстиям в слайдере, так как конструкция подразумевала фиксацию пинов в слайдере, а я хотел сделать наоборот - фиксировать пины в отверстиях линков.
Способ получить алюминиевый слайдер, конечно, не самый легкий, но, если нет другого способа, то и такой хорош. Если какой-либо производитель выпустит алюминиевый слайдер для V120D02S, то он подойдет и для SP180. Оригинальный слайдер все равно пришлось покупать из-за линков.
До сих пор думаю из чего изготовить вал хвостового ротора. Родной вал слишком мягкий и имеет срез под D-образное отверстие последней шестерни. А мне требуется просто круглый точеный вал 1.5x36мм., так как я буду делать "slipper clutch" и еще некоторые доработки.
Пока часть необходимых комплектующих находится в пути, а нижняя часть рамы - в процессе проектирования, решил сделать вал привода хвостового ротора и хвостовую балку.
Сначала расскажу о хвостовой балке. Во время эксплуатации SP180, с хвостовой балкой выявилась одна проблема. При резкой работе шагом балку немного скручивает. Нет, к ее расщеплению это не приводит, но мне хотелось иметь хвостовую балку более жесткую на скручивание. Поэтому я изготовил карбоновую балку в тонкостенной стальной оболочке. Материалом послужил карбон диаметром 4х3мм., и стальные вязальные спицы диаметром 4мм. и 3мм. Толщина стенок стальных спиц 0.15мм. Лучше бы подошел карбон диаметром 4х2.5мм., но я не нашел доступного места, где его можно приобрести. Так что пока попробую из того, что есть.
Я обшкурил карбон до состояния влезания с натягом в стальную оболочку и вклеил его на эпоксидную смолу внутрь. Далее сделал две трубочки из спицы диаметром 3мм. и длиной 15мм. и вклеил их с торцов новой хвостовой балки. Оставалось только сделать надфилем срезы на концах балки, как у оригинальной. Длина балки - 172.5мм. Вес готовой балки получился всего лишь на один грамм тяжелее оригинальной. На кручение балка очень жесткая, на изгиб, надеюсь, тоже. Да и внутренний диаметр в 3мм. оставляет надежду, что вал привода хвостового ротора не будет задевать о стенки балки. Попробую полетать с такой, а там видно будет. Если не сломается при первом же падении, то может и приживется...
Следующим пунктом идет вал привода хвостового ротора. Он отличается от оригинального, используемого на SP180. В начале вал имеет насадку из тонкостенной стальной трубочки, а первая шестерня держится на валу с помощью шплинта. Конструкция проверенная, я год пролетал с такой на SP180.
Сначала я сделал отверстие в стальной трубочке с помощью нехитрого кондуктора. Без него сделать отверстие очень проблематично, а с ним - пара секунд. Кондуктор сделал из бамбуковой палочки от суши. В трубочке я сделал отверстие сверлом 0.6мм. с помощью дремеля, а потом вручную рассверлил до 0.7мм.
Отрезал заготовку необходимой длины и с торцов подогнал ее размеры, как указано на эскизе. То есть, расстояние от начала до отверстия - 4мм., а длина всей трубочки - 15мм.
Небольшое лирическое отступление. За год эксплуатации такого вала на SP180 выявилась только одна небольшая проблема - со временем подшипник немного сминает стальную трубочку, так как нагрузки в этом узле довольно значительные. Поэтому я решил сделать стальную трубочку несколько жестче, закалив ее. Никогда раньше этого не делал, но теорию в институтах проходил.
Итак, потребуется стакан с охлажденным сильным раствором соли, канцелярская скрепка и пассатижи. Трубочка фиксируется на канцелярской скрепке, все это берется пассатижами и постепенно нагревается на газовой плите до ярко-оранжевого цвета. Быстро лучше не нагревать, чтобы не возникло внутренних напряжений в металле. При этом стакан с водой нужно держать как можно ближе к горелке, чтобы металл не успел остыть в процессе переноски к воде. Как только заготовка нагрелась, как можно быстрее опускаем ее в воду и даем остыть. Вот и все. При этом даже канцелярская скрепка становится значительно жестче. Отпуск заготовки я не делаю. Остается только слегка обшкурить трубочку снаружи от пленки окалины, а изнутри счистить окалину сверлом на 1.2мм.
Далее беру карбон диаметром полтора миллиметра, оступаю от края миллиметров 25 и обматываю эа этим местом несколькими слоями узкого скотча. Это нужно для того, чтобы шкурка не точила карбон, где этого делать не следует. Потом шкуркой, не спеша, делаю карбон тоньше так, чтобы стальная трубочка с натягом налезала до упора. Потом приклеиваю ее на эпоксидной смоле. Когда смола застыла, сверлю отверстие в карбоне. Затем окончательно отрезаю вал нужной длины от карбонового прутка и делаю срез на конце вала.
На другом конце вала я тоже хотел сделать стальную насадку, но передумал. Осмотрев вал от SP180 после полутора лет активной эксплуатации, я не увидел ни следов износа от подшипника, ни расщепления вала. Возможно этому способствовал установленный мод "slipper clutch". Так что, это место пока оставлю без доработки, а там видно будет.
Шестерню привода хвостового ротора тоже нужно доработать. Сначала я убираю на ней D-образный выступ с помощью старого вала хвостового ротора. А затем, с обратной стороны, потихоньку вручную рассверливаю в шестерне отверстие сверлом на 1.5мм. Если сразу попробовать рассверлить шестерню, без убирания D-образного выступа, то шестерню придется выкинуть, так как ровно пройти отверстие не получится - уведет сверло и шестерня будет криво сидеть на валу.
После примерки на раму, выявилась одна проблема. Шестерня из ремкомплекта не имела упора в подшипник и терлась об раму. На фотографии виден зазор между шестерней и подшипником.
Поэтому пришлось сделать тоненькую шайбочку из жести и поместить ее между шестерней и подшипником.
В шестерне делаю поперечное отверстие под шплинт сверлом 0.6мм. Все собираю на шплинте из тонкой бамбуковой щепки. За год еще ни разу такой шплинт не сломался.
Не ругайте, если посты получаются большие. Просто хочется рассказать как можно подробнее и обосновать, почему я пробую сделать так или иначе.
Пришло время завершить разборки с электроникой. Я все таки припаял сателлит OrangeRX R100 к стабилизатору на плате Tarot ZYX-S. Результат был ожидаем - все заработало. Так что дополнительный стэпдаун оказался не нужен.
У сателлита я обмотал место, где срезал термоусадку и выходят контакты, упрочненным скотчем, снятым со старых аккумуляторов. Далее я прилепил сателлит к плате двухсторонним "автомобильным" скотчем. Так же припаял пару концов с JST1.25 для подачи питания на блок и для сопряжения сателлита с передатчиком. Выводы для сервоприводов пока еще не припаивал, они еще в пути. Когда приедут, то соберу блок окончательно и запакую в кофр. В итоге пока что получилась следующая конструкция.
Далее мне потребовался кабель для запуска процедуры сопряжения сателлита с передатчиком. Схема его очень проста.
Кабель делается из концов JST1.25. Одним концом кабель подключается к BEC регулятора, а два других вставляются в разъемы на блоке Tarot ZYX-S.
В итоге вся электроника, пока что без сервоприводов, выглядит так:
Следующий этап - прошивка Tarot ZYX-S. На текущий момент доступна версия прошивки 4.01. Мне пришел блок с версией 3.5. Я скачал текущую версию прошивки по этой ссылке. В архиве есть и прошивка, и программа, и драйвер, и инструкция. Распаковав архив, я установил драйвера и программу на виртуальную машину, где у меня собраны все "вертолетные" программы.
Далее идет сам процесс прошивки. Для этого я подключил ESC и USB-кабель к Tarot ZYX-S, воткнул USB-кабель в компьютер и запустил программу и, в последнюю очередь, подцепил аккумулятор к ESC. Далее необходимо зажать у Tarot ZYX-S кнопочку, расположенную на плате и подержать 2-3 секунды, пока не загорится ровным светом красный или синий светодиод. Затем нужно в программе выбрать виртуальный COM-порт, созданный драйвером, и нажать кнопку "Connect". В результате должны позеленеть три кружочка в правом верхнем углу программы. Далее я выбрал файл прошивки "ZYX_S_401_HA.bin", нажав "Open". Затем нужно отключить аккумулятор и снова подключить, но удерживая кнопочку на блоке Tarot ZYX-S нажатой. Двумя руками это сделать непросто. На блоке начнет моргать красный светодиод. Нужно успеть быстренько нажать кнопочку "Upgrade", пока блок не вышел из режима прошивки. В итоге, внизу программы появится линейка заливки прошивки. По окончании процесса, лучше отключить и заново подключить аккумулятор. А затем можно снова войти в режим настройки, зажав кнопочку на блоке на пару секунд, и нажав в программе "Connect". Версия прошивки в правом нижнем углу программы должна измениться.
Следующий этап - сопряжение сателлита и передатчика. Сначала я выставил в настройках Tarot ZYX-S на второй вкладке режим передатчика "DSM2-1". Затем настроил передатчик. Не берусь точно сказать, что нужно делать в других передатчиках, а в DEVO10 с прошивкой Deviation нужно выставить режим "DSM2" и шесть каналов. Если поставить большее количество каналов, то блок Tarot ZYX-S будет работать некорректно. Для всего этого я создал тестовый профиль в передатчике. Скачать его можно отсюда. Пятый канал для проверки диапазона назначил на левую крутилку AUX4. Перехожу непосредственно к процессу сопряжения. Подключаю ESC через кабель для процедуры сопряжения. Какой разъем в какое из двух гнезд на блоке вставлять - без разницы. Подключаю аккумулятор, светодиод на сателлите должен часто-часто заморгать. Затем жму на передатчике кнопочку "Bind". Проходит пара секунд и светодиод на сателлите загорается ровным светом. Вот и все. Проверяю работу в мониторе каналов программы. При вращении крутилки AUX4 на блоке Tarot ZYX-S должен попеременно загораться то красный, то синий светодиод.
Затем отключаю аккумулятор , выдергиваю дополнительный кабель и подключаю все в нормальном режиме. Светодиод на сателлите должен ровно гореть. Если этого не произошло, нужно попробовать повторить процедуру сопряжения сателлита с передатчиком.
Остальные настройки Tarot ZYX-S пока что не делал. С ними буду разбираться позже, когда блок будет установлен на модель.
Пришло время заняться компоновкой в один блок Tarot ZYX-S и сателлита OrangeRX R100. Сначала я выпаял разъем с блока FBL. Потом снял термоусадку со стэпдауна, чтобы внимательнее рассмотреть, что у него внутри. Сигнальный провод проходит через блок напрямую. А понижение напряжения обеспечивает стабилизатор AMS1117-3.3 с обвязкой.
Я стал прикидывать компоновку элементов в одном блоке. Никак не получалось куда-нибудь прилепить стэпдаун. Везде он был неудобен. И вдруг я обратил внимание, что на плате Tarot ZYX-S стоит точно такой же стабилизатор AMS1117-3.3. Меня прямо как осенило, зачем нужен отдельный стэпдаун, если я могу взять 3.3 вольта для сателлита прямо с платы FBL!
Я выделил это место красным кружочком. Это средняя нога AMS1117-3.3. Но сначала нужно все проверить, не будет ли лишняя нагрузка помехой для работы FBL. Я нашел документацию на AMS1117-3.3, где сказано, что стабилизатор может выдержать нагрузку до 1A. Осталось выяснить, сколько потребляет сам блок Tarot ZYX-S. На официальной странице Tarot ZYX-S, нашлась и эта информация. Блок потребляет всего лишь 60mA. Я думаю, что сателлит OrangeRX R100 потребляет совсем немного. Так что никаких препятствий для того, чтобы взять питание для сателлита с блока FBL вроде нет.
Далее, я убрал разъем с самого сателлита, так как он стал просто не нужен. Заодно и проверил распиновку выводов платы сателлита. Оказалось, что можно подключиться как к точкам, где стоял разъем, там и к точкам, расположенным ближе к краю платы.
В итоге должен получиться очень легкий и компактный блок два-в-одном. Я не стал снимать термоусадку с сателлита, только надрезал ее в районе разъема. Сателлит буду приклеивать к плате на толстый двухсторонний "автомобильный" скотч.
Мне осталось докупить еще хвостов с JST1.25, чтобы окончательно все собрать. Как назло парочки не хватило. А пока займусь проектированием кофра для блока и сборкой того, что есть. Так же появилась идея, как удобно организовать режим сопряжения блока с передатчиком. Но об это чуть позже, когда блок будет полностью собран и придет время его прошивки и настройки.
Настало время разобраться с Tarot ZYX-S. Плата FBL была извлечена из корпуса. Габариты платы без разъема 29x23x9мм. Так же я буду использовать сателлит OrangeRX R100. Его габариты без разъема - 22x15x2мм. Еще потребуется стэпдаун с 5 вольт на 3.3 вольта.
Для примера, габариты блока электроники Solo Pro 180 - 31x19x8мм. Разница несущественная. Вот фото для сравнения:
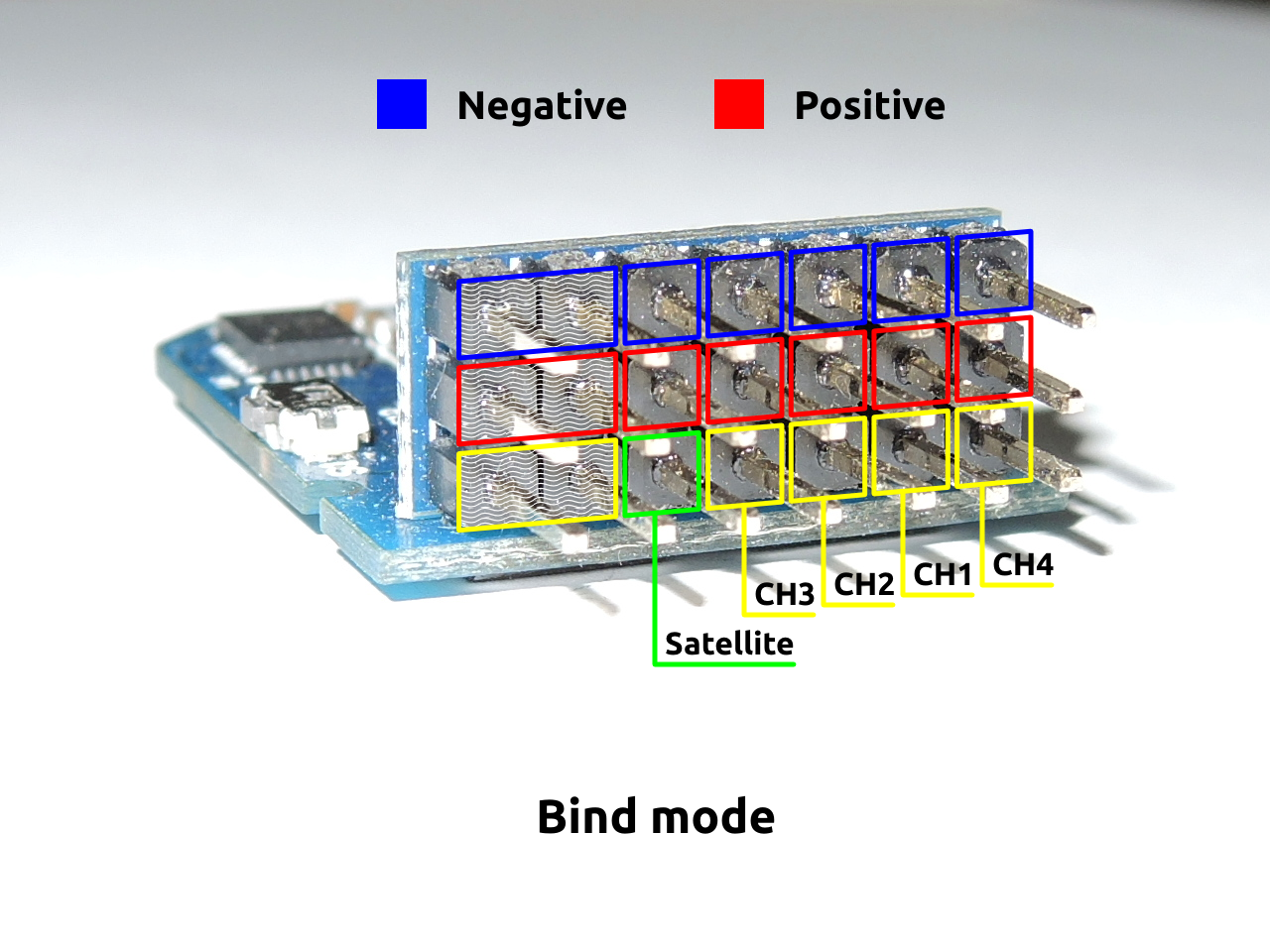
Начитавшись документации к Tarot ZYX-S, получилась вот такая схема подключения:
Три пина слева, отмеченные черным цветом, не используются при подключении сателлита без приемника. Остальная распиновка видна на картинке. Надо быть внимательнее, в корпусе Tarot ZYX-S плата стоит горизонтальной частью вверх, а у меня получается, что разъем развернут на 180 градусов. В дальнейшем, при конфигурации Tarot ZYX-S, нужно не забыть про это.
В режиме сопряжения Tarot ZYX-S с передатчиком, схема подключения немного меняется:
Нужно соединить левые, неиспользуемые в нормальном режиме, выводы с соответствующими выводами справа.
Разъем на Tarot ZYX-S будет удален, стэпдаун будет припаян напрямую к вертикальной плате коммутаций и подключен к сателлиту. Выходы на сервоприводы и соединение с BEC регулятора будут сделаны с помощью выводов с JST1.25 на концах. Все постараюсь упаковать в пластиковый кофр, по типу как это было сделано у блока Solo Pro 180. Остается открытым вопрос, как компактно сделать выводы и заглушку для выполнения сопряжения блока электроники с передатчиком.
Наконец-то дошли руки продолжить начатое. В этот раз решил установить мотор на раму. Дело оказалось не совсем тривиальным, о чем и расскажу.
Для начала я разобрал мотор Spin 8000kV. Это оказалось очень легко, латунная втулка на валу зафиксирована снаружи каплей клея. Я удалил клей острым ножиком и втулка легко снялась. Это позволило разобрать мотор и посмотреть на качество намотки обмоток. Да и втулку эту все равно пришлось бы снимать, слишком она высокая.
Родной мотор SP180 крепится на раме в трех точках болтиками M1.6, мотор Spin 8000kV крепится болтиками M1.4. Отверстия крепления на раме и моторе совпадают. Пришлось совсем немного подпилить отверстия на раме в сторону основной шестерни, потому что будет использован пиньон 8T. Родной пиньон SP180 - 10T, он больше диаметром, так что нужно будет сдвинуть новый мотор ближе к основной шестерне.
Болтики M1.4 своими головками продавливали пластиковую раму, поэтому я изготовил накладки, сверху и снизу, потому что мотор будет очень горячим и может запросто расплавить пластик рамы. Накладки я изготовил из текстолита толщиной 0.75 мм. с помощью дремеля. Рисунок на текстолит переносил с помощью метода ЛУТ, используемого при производстве печатных плат в домашних условиях. Вот файл с рисунком накладок. На фотографии слева - нижняя накладка, справа - верхняя.
Поскольку болтиков M1.4 нужной длинны я не нашел, то обрезал более длинные по месту. Получились болтики длинной 4.5мм.
С помощью латунных шайбочек на валу мотора, выставил пиньон так, чтобы он полностью входил в зацепление с основной шестерней по высоте. Пиньон пока что не стал приклеивать на локтайт. Сделаю это, когда сборка будет подходить к концу.
Собрав весь бутерброд, придвинул мотор с насаженным пиньоном к основной шестерне так, чтобы зубья шестерен полностью входили в зацепление. Зубья пиньона должны обкатывать зубья основной шестерни, а не бить по ним, то есть зазор должен быть минимальным настолько, насколько это возможно. Это залог надежной зубчатой передачи, как в институтах учили.
Так же пришлось уже по месту подпилить надфилем верхнюю накладку, чтобы основная шестерня ее не задевала.
В итоге мотор встал на раму не хуже родного. Пока еще не определился с разъемом между мотором и контроллером. Разъем, как используется на Solo Pro 180, слабоват. У меня на первой модели он уже немного оплавился. Разъем Losi, установленный на новом моторе так же не внушает доверия. Так что здесь я пока в раздумьях.
Перебирая электронные компоненты модели, раздумывая, как все соединить, пришел к выводу, что надо начать с обеспечения питанием. Как я уже говорил во вступлении, в качестве контроллера бесколлекторного двигателя я выбрал OverSky XP-12A. Выбор был мотивирован возможностью заменить прошивку контроллера на альтернативную BLHeli с возможностью настройки гувернера.
На контроллере встроен стабилизатор напряжения на 5 вольт, с него и буду питать FBL и сервоприводы. Все коннекторы между компонентами я заменю на JST-1.25, поэтому по ссылкам ниже потребуется приобрести по 3-4 пакетика каждого из этих коннекторов. Питание от аккумулятора будет идти через JST разъем, как наиболее распространенный для аккумуляторов небольшой емкости, да и надежность разъема вполне высокая. Потребуется хороший силовой провод AWG20 двух цветов - черного и красного.
Сначала я привел контроллер к нужному виду. Установил разъем подключения аккумулятора, заменил вывод питания на кабель с JST-1.25 на конце. Так же сделал вывод для программатора из такого же кабеля с JST-1.25. Сторону контроллера с управляющим чипом нужно оставить максимально плоской, так как этой стороной контроллер будет прилегать к раме вертолета. Поэтому вывод разъема программатора я перекинул на другую сторону.
Подробнее о программировании контроллера. Сначала нужно посмотреть в документации проекта BLHeli точки подключения программатора. Самую свежую версию документации можно всегда найти в репозитории исходных текстов прошивки или загрузить по прямой ссылке.
Используются три точки подключения, отмеченные белым, красным и черным кружочком. К ним и нужно подключать программатор.
Выводы программатора я отметил соответствующим цветом.
Оставалось только сделать провод, соединяющий программатор и контроллер. Для этого я сделал врезку в провод, идущий в комплекте с программатором, из хвоста с разъемом JST-1.25 на конце.
Далее идет сам процесс установки прошивки. Для упрощения процесса существует проект BLHeli Setup. Скачиваем последнюю версию и устанавливаем. Поскольку программа только под Windows, а я использую Linux, то пришлось задействовать виртуальную машину VirtualBox, чтобы установить прошивку.
Соединяем контроллер и программатор, вставляем программатор в USB-порт компьютера, запускаем BLHeliSetup. Программа должна найти ваш программатор, слева от кнопки "Connect" должен появиться его серийный номер. Если это произошло, то в последний момент подключаем аккумулятор к контроллеру и нажимаем кнопку "Connect". Далее "Flash BLHeli", выбираем свой контроллер, тип "Main", прошивку последней версии и "Ok". Если все прошло успешно, то программа сообщит об этом. Вот и все. В конце приведу временную конфигурацию для OverSky XP-12A с двигателем Spin 8000kV.
Обеспечив питание для модели, следующим шагом планирую разобраться с блоком стабилизации Tarot ZYX-S с сателлитом OrangeRX R100.