Новый тинивуп BetaFPV Meteor 65 Pro - попытка сделать хорошо сбалансированный по летным характеристикам аппарат. Как показала практика, наибольшая эффективность получается у тинивупа на 75-й раме с легкими 40-ми пропеллерами. Но использовать такой вариант для гонок не получается. Слишком вальяжное управление из-за низких оборотов пропеллеров на компактной трассе. Но на трассе с большими промежутками между препятствиями - просто вне конкуренции! С другой стороны, у тинивупа на 65-й раме с 31-ми пропеллерами энергоэффективность оставляет желать лучшего, зато маневренность на высоте. Так и напрашивался промежуточный вариант с 35-ми пропеллерами и, желательно, на 65-й раме. Первая попытка была у Eachine с моделью UZ65, но дебют был неудачным - получился слишком тяжелый аппарат с прожорливыми 35-ми пропеллерами от HQ. На радостях, что появились первые 35-е пропеллеры, накупил их целую гору, а по факту они оказались просто увеличенным вариантом 31-х:(

Компания BetaFPV сделала свою попытку создать сбалансированный тинивуп - модель с новым компактным полетным контроллером со встроенным ExpressLRS-приемником, на ультралегкой раме с новыми 35-ми пропеллерами от Gemfan. Посмотрим, что у них по итогу получилось:)
Краткие характеристики BetaFPV Meteor 65 Pro:
- База: 65мм
- Вес: 22.05г (без аккумулятора)
- Взлетный вес: 30.25г
- Полетный контроллер: F4 1S 5A (ELRS 2.4G)
- Рама: Meteor65 Pro 65мм
- Моторы: 0802SE 19500kV
- Пропеллеры: Gemfan 35мм под вал 1.0мм
- Камера: BetaFPV C02 1200TVL NTSC
- Передатчик: BetaFPV M03 25-350мВт
- Канопа: пластиковая, литая
- Приемник: встроенный ExpressLRS на SPI-шине
- Аккумуляторы: 300мАч 1S LiHV с BT2.0-разъемом
Характеристики полетного контроллера BetaFPV F4 1S 5A (ELRS 2.4G):
- Процессор STM32F411
- Гироскопы MPU6000/ICM20689 на SPI-шине
- BetaFlight OSD AT7456E
- Приемник SPI ExpressLRS 2.4G
- Керамическая SMD-антенна
- Питание 1S 4.35В
- Провод питания 22AWG длиной 55мм с BT2.0-разъемом
- Максимальный ток 5А, в пике (3с) 6А
- Прошивка регуляторов O_H_5_REV16_8 на 48кГц
- Поддержка SmartAudio
- Выводы UART1
- Выводы под пищалку
- Вес без силового провода 3.05 грамм
Упакована модель просто шикарно! Плотный компактный жесткий кейс на молнии. Внутри углубление под тинивуп, кармашик в крышке. Даже резиночку сделали, чтобы квадрик внутри не болтался! Есть место и под пару аккумуляторов, но, если вынуть поролоновую заглушку, то десяток аккумуляторов под модель влезет без проблем.

Комплектация на уровне. Дополнительный комплект пропеллеров, отвертка, два аккумулятора на 300мА/ч, шикарный тестер-зарядка и шнур с USB-C-разъемом.

В первую очередь, отмечу новый тестер-зарядку. По функционалу и габаритам ничем не отличается от предыдущей модели, только другой корпус и встроенный USB-C вместо торчащего внешнего USB-разъема. Не знаю, на сколько лучше такое решение, но владельцам новой модели придется возить с собой и USB-шнур, если потребуется подзарядить аккумуляторы.

В остальном, все привычно. С одного торца USB-C, с другого - два BT2.0-разъема, один из которых служит для тестирования аккумулятора. Под полупрозрачной крышкой спрятался экран, показывающий напряжение тестируемого аккумулятора

Заряжать можно только LiHV-аккумуляторы! В процессе зарядки индикаторы красного цвета. Когда аккумулятор заряжен, индикатор меняет цвет на зеленый.

Стоковые аккумуляторы весят по 8.15-8.25 грамм. По токоотдаче претензий нет, работают на отлично, живут долго. Покупаю их регулярно и достойной альтернативы пока не вижу.
Теперь собственно сам тинивуп BetaFPV Meteor 65 Pro. На первый взгляд и не скажешь, что он на пропеллерах большего диаметра. Диагональ рамы осталась 65мм.

Как обычно, производитель чуть нагнал лишнего веса, от которого легко избавиться. Стоковый вес тинивупа 22.05г.

В профиль видно, что холдер аккумулятора сделан на уровне с мотормаунтами, что есть хорошо.

Снизу все, как обычно: разъемы моторов легко доступны, USB-разъем ни чему не мешает, кнопка Bind/Boot на видном месте.

Аккумулятор вставляется с небольшим усилием, будет хорошо держаться в раме. Традиционно для BetaFPV, на силовых 22AWG-проводах установлен BT2.0-разъем.

Используются 0802SE-моторы на 19500kV собственного производства. Подробнее рассмотрим их ниже.
Традиционно разбираю модель. Внутри канопы установлена камера и передатчик, последний соединен с полетным контроллером пятью выводами.

В первую очередь, рама. На удивление, очень легкая, весит всего 3.23 грамма. Мотормаунты традиционно жесткие, а кольца защиты - мягкие.

По сравнению с рамой под 31-е пропеллеры, размер практически не отличается. Было интересно, влезет ли в эту раму полетный контроллер классического формата. Для примера, взял плату от Mobula6.

Влезает, но практически в натяг. Полетный контроллер типа DiamondF4 ELRS вряд ли получится установить:(
Камера BetaFPV C02 имеет матрицу размером 1/4". Габариты 11x14.3мм, угол обзора 160°, линза 2.1мм. Вес камеры 1.4г. Камеру можно подключить через пятачки для пайки или через JST0.8-разъем.

В комплекте идет редкий проводок с двумя JST0.8-разъемами весом 0.14г. Не стоит ожидать от камеры хорошей картинки, но WDR на удивление работает неплохо. Это просто проходная камера, не более, да еще и 16:9!
Канопа литая, со стоечками для крепления камеры и передатчика. Вес - 1.33г, вес с креплением камеры - 1.52, вес четырех шурупчиков - 0.2г.

По ширине стоечек, в канопу влезет любая камера, но фиксатор для камеры рассчитан только на камеры шириной 11мм. Под Caddx Ant Lite или Foxeer Pico Razer придется моделировать новое крепление - это единственный вариант установить более-менее нормальную камеру с матрицей 1/3 дюйма.
Передатчик BetaFPV M03 имеет переключаемую мощность 25/100/200/350мВт, управляется через SmartAudio. Его вес без антенны 1.15г. Камеру к нему можно подключить либо через JST0.8-разъем, либо подпаять напрямую к доступным площадкам. К полетному контроллеру передатчик припаивается пятью проводками. Видеосигнал передается через обычную диполь-антенну. Ее вес 0.45г.
Моторы BetaFPV 0802SE на 19500kV весят по 1.83г. Магниты тонкие, ротор легкий. Ротор не цельный, что уже не модно:) Обмотки статора выведены на тонкую платку и к ней уже припаяны выводы мотора.

Между ротором и статором есть только одна тефлоновая шайба. Подшипники - латунные втулки. Снизу нет никаких шайбочек и получается так, что стопорное кольцо, фиксирующее вал мотора, будет напрямую контактировать с латунной втулкой, что не есть хорошо. И да, уже стало нормой на моторах такого размера фиксировать вал еще одним стопорным кольцом над ротором, чтобы вал не уползал вниз при установке пропеллера.
Пропеллеры Gemfan 35мм под вал 1мм весят 1.24г. По сути, это растянутые по двум осям 31-е пропеллеры этого же изготовителя. И это печально.

По итогу, ширина лопастей увеличилась, шаг уменьшился. Пропеллеры получились тяжелые и тугие на разгон, но загребущие и в меру прожорливые.
По поводу пропеллеров для 35-й рамы хочется сделать лирическое отступление. На текущий момент хороших пропеллеров этого размера нет. Пока только HQ и Gemfan выпустили свои варианты и они, прямо скажем, убогие. Основная идея увеличения диаметра пропеллеров была в увеличении эффективности работы моторов. А для этого не надо было увеличивать площадь лопастей, просто адаптируя модели 31-х пропов. Нужно было сделать лопасти даже чуть более узкими, но длиннее на пару миллиметров. И все! Чтобы вес пропеллера оставался прежним, чтобы пропеллеры не выжирали аккумулятор за пару-тройку минут. В общем, нужны пропеллеры легкие, с узкими лопастями и не сильно задранным шагом. От тинивупных пропеллеров нужна динамика, а не максимальная тяга. Поэтому, если требуется хоть какая-то эффективность, лучше обрезать старые четырехлопастные HQ на 40мм или Azi-трешки на 40мм.
Осталось основное блюдо - новый полетный контроллер BetaFPV F4 1S 5A (ELRS 2.4G) с интегрированным ExpressLRS-приемником. ExpressLRS - очень прикольная штука. Менее чем за год этот открытый протокол практически вытеснил все остальные коммерческие варианты. Основное его преимущество - максимально быстрая связь с моделью и приличная дальность. Сейчас только ленивый не переделывает AIO-полетники на поддержку ExpressLRS:)

Вес полетного контроллера без силового провода 3.08г. Собран очень аккуратно, припоя минимальное количество. Если избавиться от разъемов под моторы, то вес будет 2.68г. Понятное дело, что для полноценной работы не хватает видеопередатчика - это еще плюс один грамм минимум. По итогу, вес всего блока приблизится к четырем граммам. По составу электроники все стандартно: F411-процессор, MPU6000-гироскоп (в будущих выпусках заменен на ICM20689), AT7456E в качестве OSD, EFMBB21-чипы в блоке регуляторов и SIA517DJ-T1-GE3 силовые ключи. ExpressLRS-приемник реализован на SX1280-чипе. Антенна приемника - керамическая. Если кому не нравится, что она торчит над платой, можно легко ее отпаять, под ней есть отверстие под обычную антенну длиной 31мм.

Датчика тока нет, что печально, ибо бывает интересно посмотреть на "прожорливость" силовой установки. Этот полетный контроллер "богат" на периферию. У предыдущей версии такого разнообразия не было. Есть вывод под пищалку и полноценный UART, даже с инвертированным RX! Можно будет относительно без проблем повесить управляемые светодиоды, если сделать ремапинг ресурсов.
Собираю аппарат и приступаю к настройке. Начну с блока регуляторов.

По умолчанию там стоит прошивка BLHeli_M-16.8 на 48кГц с поддержкой RPM-телеметрии. Вариант рабочий, но я предпочитаю Bluejay. Устанавливаю последнюю версию, так же в варианте на 48кГц.

Настройки уже устоявшиеся, с ними все прекрасно работает. Заодно настроил вращение моторов в нужную сторону. По умолчанию, пропеллеры стояли на нормальное вращение.
По умолчанию в полетном контроллере стоит очень древняя прошивка. Лучше сразу обновить ее на то, что предлагает производитель на странице поддержки. Там же есть и свежие настройки. А мне проще установить текущую версию BetaFlight-4.3.0-RC6 для таргета BETAFPVF4SX1280.

Новая версия BetaFlight-4.3.0 очень интересная. Там появились пресеты и настройка нового квадрика сводится к применению части этих предварительных настроек. По итогу, получилась следующая конфигурация:
# version
# Betaflight / BETAFPVF4SX1280 (BHER) 4.3.0 Apr 25 2022 / 00:42:18 (9d71184) MSP API: 1.44
# start the command batch
batch start
# reset configuration to default settings
defaults nosave
# name: Meteor65Pro
# serial
serial 30 2048 115200 57600 0 115200
# beeper
beeper -ALL
# beacon
beacon RX_LOST
beacon RX_SET
# aux
aux 0 0 0 1900 2100 0 0
aux 1 1 1 1900 2100 0 0
aux 2 2 2 1900 2100 0 0
aux 3 13 3 1900 2100 0 0
aux 4 15 5 900 1100 1 0
aux 5 15 0 900 1100 1 0
aux 6 35 4 1900 2100 0 0
# vtxtable
vtxtable bands 5
vtxtable channels 8
vtxtable band 1 BOSCAM_A A FACTORY 5865 5845 5825 5805 5785 5765 5745 5725
vtxtable band 2 BOSCAM_B B FACTORY 5733 5752 5771 5790 5809 5828 5847 5866
vtxtable band 3 BOSCAM_E E FACTORY 5705 5685 5665 5645 5885 5905 5925 5945
vtxtable band 4 FATSHARK F FACTORY 5740 5760 5780 5800 5820 5840 5860 5880
vtxtable band 5 RACEBAND R FACTORY 5658 5695 5732 5769 5806 5843 5880 5917
vtxtable powerlevels 4
vtxtable powervalues 0 1 2 3
vtxtable powerlabels 25 100 200 350
# master
set yaw_spin_recovery = ON
set yaw_spin_threshold = 800
set rc_smoothing_auto_factor = 25
set rc_smoothing_auto_factor_throttle = 25
set airmode_start_throttle_percent = 60
set blackbox_device = NONE
set dshot_idle_value = 900
set dshot_bidir = ON
set motor_pwm_protocol = DSHOT300
set motor_poles = 12
set vbat_max_cell_voltage = 460
set vbat_min_cell_voltage = 310
set vbat_warning_cell_voltage = 330
set current_meter = NONE
set beeper_dshot_beacon_tone = 4
set yaw_motors_reversed = ON
set small_angle = 180
set deadband = 2
set yaw_deadband = 2
set runaway_takeoff_prevention = OFF
set osd_warn_rssi = ON
set osd_warn_link_quality = ON
set osd_cap_alarm = 300
set osd_tim1 = 1025
set osd_vbat_pos = 2433
set osd_link_quality_pos = 2103
set osd_tim_1_pos = 2455
set osd_throttle_pos = 2448
set osd_vtx_channel_pos = 2440
set osd_craft_name_pos = 2081
set osd_stat_tim_1 = ON
set osd_stat_tim_2 = OFF
set osd_stat_max_spd = OFF
set osd_stat_battery = ON
set osd_stat_bbox = OFF
set osd_stat_bb_no = OFF
set osd_stat_max_esc_rpm = ON
set cpu_overclock = 120MHZ
set vtx_band = 5
set vtx_channel = 3
set vtx_power = 1
set vtx_freq = 5732
set vcd_video_system = NTSC
set name = Meteor65Pro
profile 0
# profile 0
set vbat_sag_compensation = 100
set anti_gravity_gain = 2500
set crash_recovery_angle = 5
set crash_recovery = ON
set iterm_relax_cutoff = 10
set iterm_limit = 500
set pidsum_limit = 1000
set pidsum_limit_yaw = 1000
set p_pitch = 86
set i_pitch = 38
set d_pitch = 91
set f_pitch = 229
set p_roll = 82
set i_roll = 36
set d_roll = 80
set f_roll = 220
set p_yaw = 82
set i_yaw = 36
set f_yaw = 220
set d_min_roll = 74
set d_min_pitch = 84
set thrust_linear = 20
set feedforward_averaging = 2_POINT
set feedforward_smooth_factor = 65
set feedforward_jitter_factor = 3
set feedforward_boost = 18
set dyn_idle_min_rpm = 35
set simplified_master_multiplier = 160
set simplified_i_gain = 25
set simplified_d_gain = 155
set simplified_pi_gain = 115
set simplified_dmax_gain = 25
set simplified_feedforward_gain = 115
# restore original profile selection
profile 0
rateprofile 0
# rateprofile 0
set thr_mid = 40
set thr_expo = 50
set roll_rc_rate = 18
set pitch_rc_rate = 18
set yaw_rc_rate = 20
set roll_expo = 50
set pitch_expo = 50
set yaw_expo = 20
set roll_srate = 53
set pitch_srate = 53
set yaw_srate = 106
set tpa_breakpoint = 1750
# save configuration
save
Отдельно отмечу привязку квадрика к пульту. Для понимания процесса надо обратиться к документации по ExpressLRS. Самое простое - это забиндить, как классический приемник: нажать кнопку "Bind Receiver" в настройках приемника конфигуратора BetaFlight.

Затем нажать опцию "Bind" в настройках ExpressLRS-модуля.
Вроде бы все просто, но есть нюанс. Если используется функция Model Matching (в моих настройках модуля она включена), то номер приемника в настройках модели в пульте должен соответствовать таковому и в настройках тинивупа.
Чтобы задать номер приемника в настройках полетного контроллера, надо выполнить соответствующую команду.
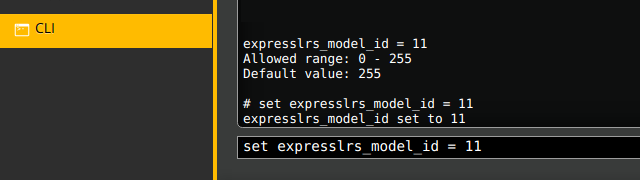
На тинивупах стал летать в race-режиме - это акро, но со стабилизацией по роллу. Режим дает отличный контроль по роллу и не вызывает привыкания - после тинивупов без проблем летаю на гоночных. Чтобы его активировать, надо выполнить в консоли простую команду. Отключается режим заданием этого же параметра с противоположным значением.

Несколько удивила реализация управления передатчиком - через softserial. Эта функция довольно прожорливая до ресурсов процессора, тем более есть свободный второй UART, который никак не выведен на плату полетного контроллера.

Заглянул в список ресурсов, softserial организован на выводе A08, причем и TX и RX. А еще и вывод пятого мотора на нем висит.
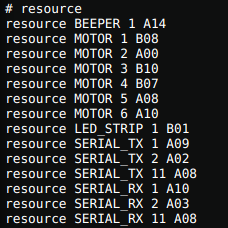
Попробовал освободить этот вывод и сделать ремапинг на UART2-TX, перкинул на него же управление передатчиком - не видит передатчик. Ладно, ради эксперимента сделал ремапинг на UART1-TX - тоже тишина. Странно, должно работать, а не работает... Получается, чтобы избавиться от softserial, надо перекинуть проводок управления передатчиком на UART1-TX, а вывод A08 можно использовать для управления светодиодами, если сначала освободить его, а затем сделать ремапинг ресурсов на LED_STRIP.
Как летит новый тинивуп BetaFPV Meteor 65 Pro и оправдались ли ожидания? Сразу отвечу - не совсем. Висит квадрик на 40% газа, что просто прекрасно! Летает на батарейке годовалой свежести примерно 4 минуты в режиме гонки. Но... Но управляемость оставляет желать лучшего. Из-за тяжелых на разгон пропеллеров, тинивуп не очень отзывчивый на управление. Маневры надо закладывать с упреждением, несмотря на быструю связь с пультом, которую обеспечивает ExpressLRS. Но по прямой топит он зачетно! В любимом магазине полетать не удалось, пришлось летать в замученной ремонтом квартире:)
Как и писал выше про камеру, она такое себе. При плохом освещении очень шумная картинка и соотношение сторон 16:9 просто выводит из себя. Кто вообще это придумал, когда NTSC подразумевает картинку 4:3? Бесит...
Еще есть небольшая претензия к раме. Как и у варианта с 31-ми пропеллерами, зазор между кольцами защиты и пропеллерами очень маленький. Если раму хоть немного перекосит, пропеллеры начнут зацепляться за кольца защиты. Особенно это опасно при старте моторов - могут сгореть силовые ключи на полетном контроллере.
В целом, новый тинивуп хорошо подойдет для полетов по размашистым трассам или просто полетать во дворе на детской площадке. Под компатные трассы не зайдет, слишком инертный отклик на управление. Отдельно стоящий от полетного контроллера передатчик вроде бы хорошо, но это лишний вес, провода... Если бы интегрировали на полетный контроллер не сильно мощный передатчик, допустим с мощностями 25/50/100мВт, да еще бы оставили такой форм-фактор - было бы замечательно. Мечты, мечты...