Все компоненты для бесколлекторного апгрейда WLToys V933 наконец-то подготовлены. Пришло время установить основной двигатель. Сначала я стал прикидывать, как установить двигатель вместо родного. Но переделки рамы, самого двигателя, сервоприводов и шасси оказались настолько глобальны, что проще было вообще отказаться от идеи поставить бесколлекторный двигатель на V933.
Тогда я вспомнил, как устанавливал бесколлекторный двигатель на модель NE Solo Pro. Он располагался слева-сзади и прекрасно работал. Осмотрев раму, я понял, что такой вариант установки будет наиболее оптимальным. Переделка рамы минимальна, двигатель очень легкий, так что, я надеюсь, центровка не пострадает.
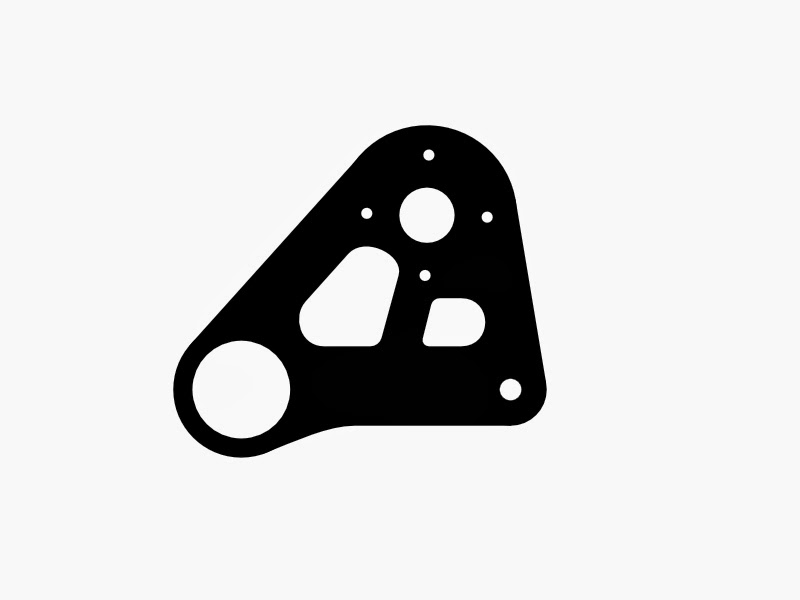
Я нарисовал шаблон будущего крепления в векторном редакторе Inkscape. Крепление будет держаться за шахту основного вала и приклеится к нижней части рамы.
 Для этого я срезал мешающее ребро жесткости острым ножом в нижней части рамы.
Для этого я срезал мешающее ребро жесткости острым ножом в нижней части рамы.

Затем я изготовил шаблон крепления двигателя из тонкого текстолита методом ЛУТ, приклеил его к карбоновой пластине толщиной 0.5мм. двухсторонним скотчем и просверлил все отверстия. Чтобы шаблон не смещался, в отверстия вставил шпильки из зубочисток. Вырезал крепление с помощью дремеля и надфилей. Рисунок шаблона можно скачать здесь.
После примерки и подгонки, я аккуратно приклеил крепление двигателя к раме суперклеем, предварительно немного зашкурив поверхность карбона в местах склейки.

Оставалось только прикрутить двигатель на свое место, одеть пиньен, вставить основной вал с шестренкой и проверить всю систему на жесткость и легкость вращения.

Для начала я решил установить пиньен на 8 зубъев, но в дальнейшем попробую пиньены на 7 и 9 зубъев. К сожалению, я поздно узнал, что здесь можно приобрести пластиковые пиньены. Внизу страницы есть предложение о покупке пластикового пиньена с модулем 0.5 на 8 зубъев. Они лучше латунных тем, что меньше шумят, не стачиваются и их не надо приклеивать к валу.
Осмотрев основную плату, я нашел точки подключения регуляторов. Выпаял разъем питания, так как питание на плату будет подаваться с блока регуляторов. Заодно заменил антенну - родная почти отломилась у основания. Антенну развернул на лицевую сторону - пойдет внутрь канопы.

Блок регуляторов установил на парочку подушек из толстого двухстороннего скотча, размером чуть больше, чем блок ключей на плате регулятора. Для более надежной фиксации блока регуляторов использовал парочку тонких колечек из термоусадки.


Разъем питания использовал старый, выпаянный с основной платы. Сигнальные выводы и питание к основной плате сделал проводом МГТФ. Осталось приклеить пиньен.
Подцепил хвост, надел канопу, вставил аккумулятор и проверил центровку модели. Опасения относительно задней центровки оказались напрасны. Благодаря некоторому выносу вперед блока регуляторов, центровка осталась в районе основного вала.
Бесколлекторный хвост поставлю позже. Сейчас хочется настроить регулятор основного двигателя, провести замеры веса, тяги, оборотов и, конечно же, испытать апгрейд в полете.
Список комплектующих:
80×450×0.5mm With 100% Carbon Fiber plate / panel / sheet 3K plain weave - 1шт.
Тогда я вспомнил, как устанавливал бесколлекторный двигатель на модель NE Solo Pro. Он располагался слева-сзади и прекрасно работал. Осмотрев раму, я понял, что такой вариант установки будет наиболее оптимальным. Переделка рамы минимальна, двигатель очень легкий, так что, я надеюсь, центровка не пострадает.
Я нарисовал шаблон будущего крепления в векторном редакторе Inkscape. Крепление будет держаться за шахту основного вала и приклеится к нижней части рамы.

Затем я изготовил шаблон крепления двигателя из тонкого текстолита методом ЛУТ, приклеил его к карбоновой пластине толщиной 0.5мм. двухсторонним скотчем и просверлил все отверстия. Чтобы шаблон не смещался, в отверстия вставил шпильки из зубочисток. Вырезал крепление с помощью дремеля и надфилей. Рисунок шаблона можно скачать здесь.
После примерки и подгонки, я аккуратно приклеил крепление двигателя к раме суперклеем, предварительно немного зашкурив поверхность карбона в местах склейки.

Оставалось только прикрутить двигатель на свое место, одеть пиньен, вставить основной вал с шестренкой и проверить всю систему на жесткость и легкость вращения.

Для начала я решил установить пиньен на 8 зубъев, но в дальнейшем попробую пиньены на 7 и 9 зубъев. К сожалению, я поздно узнал, что здесь можно приобрести пластиковые пиньены. Внизу страницы есть предложение о покупке пластикового пиньена с модулем 0.5 на 8 зубъев. Они лучше латунных тем, что меньше шумят, не стачиваются и их не надо приклеивать к валу.
Осмотрев основную плату, я нашел точки подключения регуляторов. Выпаял разъем питания, так как питание на плату будет подаваться с блока регуляторов. Заодно заменил антенну - родная почти отломилась у основания. Антенну развернул на лицевую сторону - пойдет внутрь канопы.

Блок регуляторов установил на парочку подушек из толстого двухстороннего скотча, размером чуть больше, чем блок ключей на плате регулятора. Для более надежной фиксации блока регуляторов использовал парочку тонких колечек из термоусадки.


Разъем питания использовал старый, выпаянный с основной платы. Сигнальные выводы и питание к основной плате сделал проводом МГТФ. Осталось приклеить пиньен.
Подцепил хвост, надел канопу, вставил аккумулятор и проверил центровку модели. Опасения относительно задней центровки оказались напрасны. Благодаря некоторому выносу вперед блока регуляторов, центровка осталась в районе основного вала.
Бесколлекторный хвост поставлю позже. Сейчас хочется настроить регулятор основного двигателя, провести замеры веса, тяги, оборотов и, конечно же, испытать апгрейд в полете.
Список комплектующих:
80×450×0.5mm With 100% Carbon Fiber plate / panel / sheet 3K plain weave - 1шт.






