Идея серии заметок появилась после многочисленных вопросов в личных сообщениях, постов на различных ресурсах, да и просто из общения с друзьями и единомышленниками на тему, какие комплектующие лучше всего использовать для современного бесколлекторного тинивупа, какой квадрик выбрать из готовых, как облегчить модель, какую прошивку использовать и прочее...

Ответы на эти вопросы многогранны, требуют наличия опыта в сборке, настройке и полетах. Всем этим располагаю и хочу поделиться. Сразу оговорюсь, что речь пойдет только о моделях для соревнований, где важна скорость, мощность, маневренность, точность управления и крашеустойчивость, где решают тюнинг и мастерство пилота.
Для начала определимся, что подразумевать под словами "тинивуп". Это квадрик с диагональю рамы до 75мм, с защитой пропеллеров и питанием от одной банки. Все остальные варианты, выходящие за эти рамки, классифицируются по другому. Например, зубочистка - тинивуп без защиты пропеллеров; пауэрвуп - тинивуп с питанием больше, чем от одной банки; синевуп - тинивуп с установленной FullHD-камерой. Соответственно, бесколлекторный тинивуп - это тинивуп с бесколлекторными моторами, о таких моделях и будет рассказ.
Почему речь только о гоночных вариантах, что мешает просто летать и получать удовольствие? Объясню. Пока вы начинающий пилот, каждый вылет приносит радость - это уже событие, наполненное эмоциями. Но со временем и опытом просто так летать надоедает, эмоции уже не такие яркие, и на этом этапе происходит разделение пилотов на фристайлеров и гонщиков. Фристайл на тинивупе, чего?! Не спорю, есть узкая группа любителей, у них иногда даже получается красиво. Сам лично пробовал крутить пауэрлупы в комнате. Да, прикольно, но на этом и все. Значительная часть тинивуперов рано или поздно приходит в гоночки. О, да! Это яростная борьба, яркие эмоции, нервы, адреналин, горечь поражений и радость побед! Это стратегия и тактика, поиск слабых мест у противника и оптимизация траекторий, тюнинг техники и оттачивание навыков управления. А еще, это зловещая тишина на тренировках, нарушаемая только писком пропеллеров, бормотанием засечки, клацаньем стиков и тихим матерком сквозь зубы:)
Основополагающим фактором в тинивупостроении является баланс между временем полета, весом аппарата и мощностью силовой установки. Весь этот треугольник плотно взаимосвязан. Например, увеличили мощность, увеличилось потребление энергии - сократилось полетное время. Уменьшили вес, уменьшилось потребление энергии - увеличилось время полета.
Чтобы правильно рассчитать баланс, нужна некая опорная точка. Пусть это будет время полета. Допустим, нам требуется время активного, бодрого полета 4 минуты. Сможет ли нам дать такое время аккумулятор на 250мА/ч? Такой аккумулятор должен питать током 0.25А некую нагрузку в течении одного часа. Или, составив простую пропорцию, током 3.75А в течении 4-х минут. Увы, бесколлекторные тинивупы несколько прожорливее. Для них ток в 4.5А - это норма при активном полете, а максимальный доходит до 5А. Значит, на аккумуляторе в 250мА/ч при токе 5А квадрик сможет летать всего 3 минуты, что нас, конечно, не устраивает. А сможет ли аккумулятор на 250мА/ч отдавать ток в 5А? Сможет, но недолго. При этом он должен быть минимум на 20С, а на деле все они на 15С, чтобы не писал производитель на этикетке. Распухнет он от такого тока за десяток вылетов! Хорошо, а если на 300мА/ч? Такой аккумулятор может питать нагрузку в течении 4-х минут током 4.5А - уже ближе к теме, что и подтверждает практика. На свежем аккумуляторе на 300мА/ч тинивуп летает примерно 4 минуты при максимальном токе 5А.
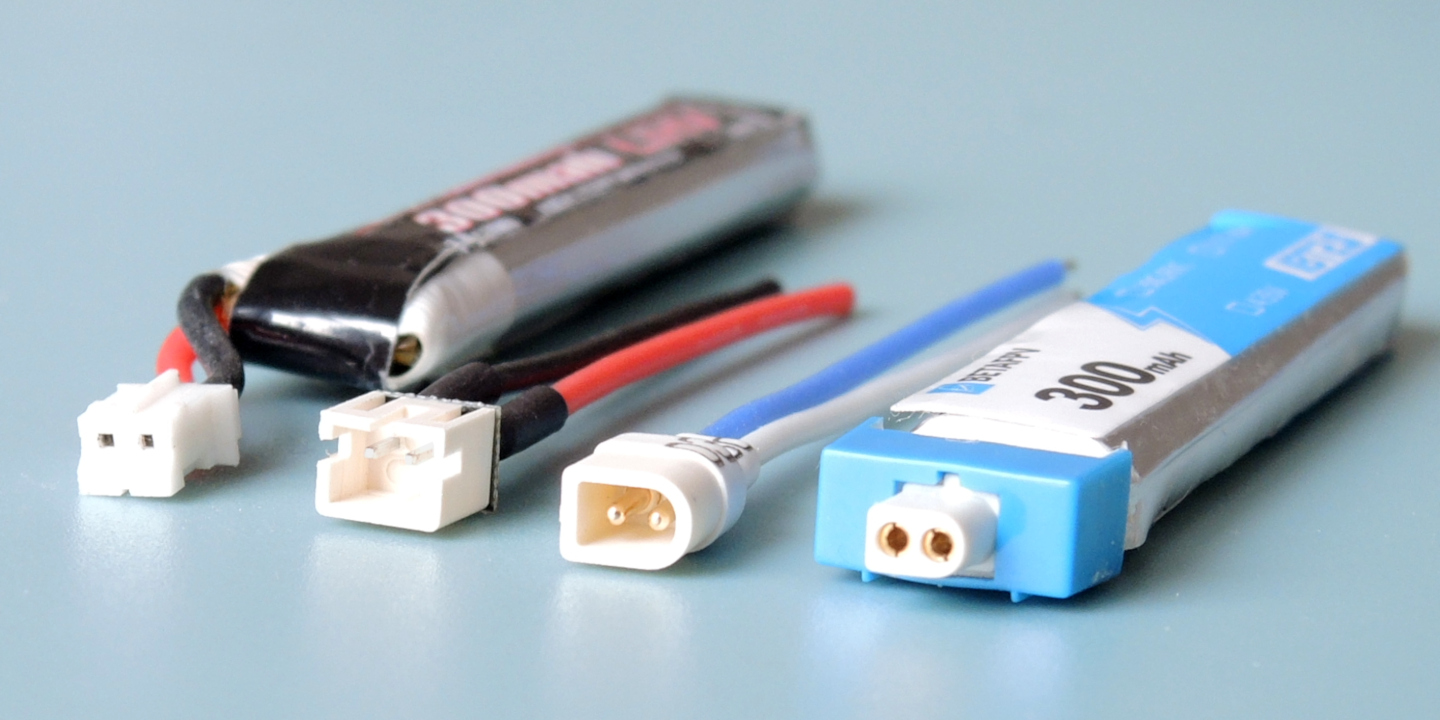
Вырисовываются некоторые цифры: время полета 4 минуты, емкость аккумулятора 300мА/ч, максимальный ток 5А. После аккумулятора идет силовой разъем. Какой выбрать? Для PH2.0 ток в 5А - это предел. Он и так-то рассчитан на ток не более 2А. Да, все будет работать, просто надо следить за чистотой контактов, их износом, вовремя менять разъем, если почувствовали, что тяги стало недостаточно. Это самый легкий разъем для тинивупа. Для BT2.0-разъема от BetaFPV номинальный ток составляет 9А, а максимальный 15А. При токе 5А можно вообще забыть о проблемах с разъемом питания. Мой выбор - BT2.0. Есть еще новый коннектор GNB27, его пока даже не рассматриваю как альтернативу, он самый тяжелый из представленных.
Силовой провод - следующий компонент. Конечно, хотелось бы, чтобы он был как можно короче, меньше весил. Тут использую небольшую хитрость - припаиваю силовой провод под углом 90 градусов к разъему питания.

Это позволяет значительно уменьшить длину провода, уменьшить вес, избавляет от заламывания провода в районе силового разъема. Какого сечения выбрать провод? Для тока не более 5А вполне достаточно провода толщиной 24AWG. Иногда на тинивуп ставят тяжелый провод толщиной 22AWG и это уже перебор.
Какая силовая установка обеспечит достаточную тягу при максимальном токе 5А? Самая лучшая комбинация, что мне встречалась - это SE0802-моторы на 19000kV с легкими HQ-пропеллерами на 40мм. При весе квадрика в районе 20 грамм, с такой силовой установкой ток очень редко доходил до 5А, обычно был в районе 4А. Аккумуляторы после полета были едва теплыми, большой нагрузке не подвергались, жили долго и не умирали даже после сотни циклов. Сейчас появились новые моторки Happymodel EX0802 на 19000kV, чуть более легкие.

На сегодняшний день они оптимальны. Да, можно поэкспериментировать с 0603-моторами, но незначительный выигрыш в весе обернется значительным проигрышем в мощности - проверено. Почему только 19000kV? К сожалению, этот параметр у однотипных моторов нельзя отрегулировать плавно. Для вышеназванных 0802-моторов, 19000kV - это 9 витков на зуб проводом 0.2мм, 22000kV - 8 витков на зуб, 25000kV - 7 витков на зуб проводом 0.25мм. Моторы на 22000kV будут потреблять больше 5А, на 25000kV - значительно больше, до 7А. Если силовой разъем и провода пропустят такой ток, то в скором времени аккумулятор раздуется и придет в негодность. Да и время полета будет значительно меньше расчетных 4-х минут. Еще момент, обходите стороной моторы на реальных подшипниках. Они увеличивают вес мотора, не выдерживают той нагрузки, что приходится на вал, и довольно быстро приходят в негодность, начинают греметь, появляется поперечный люфт. Поверьте, латунных втулок в 0802-моторе хватит до конца жизни квадрика, на котором этот мотор установлен. Моторы не надо ни смазывать, ни промывать, достаточно просто содержать их в относительной чистоте, вовремя убирать намотанную шерсть и волосы, и следить, чтобы выводы обмоток не задевали за вращающийся ротор мотора.
Сейчас производители стали больше обращать внимание на надежность моторов. Бывает так, что при ударах стальное кольцо с магнитами сползает с основания ротора. В новых моторах Tinywhoop Boost Juice эта проблема решена. Ротор мотора выполнен в виде алюминиевой чашки, а внутрь вставлено стальное кольцо с магнитами.

По этому же пути пошли и китайские производители. Happymodel уже выпускают обновленные EX0802-моторы с цельнометаллическим ротором.

Какие пропеллеры выбрать? Пропеллеры должны быть максимально легкими, с не очень широкими лопастями и с небольшим шагом. Для тинивупов с диагональю 75мм наилучшим вариантом будут вышеупомянутые HQ-пропеллеры на 40мм. Можно попробовать новые NBD Azi на 40мм - они достаточно легкие. Для 65-х рам выбор так же не богат: либо четырехлопастные тонкие HQ, либо трехлопастные Gemfan 1219. Опять же, можно попробовать NBD Azi на 31мм и новые трехлопастные HQ. С первыми удобно летать на компактной трассе на небольшой скорости, с остальными - на быстрой трассе с длинными участками, где можно получить выигрыш в скорости.

Остальные варианты пропеллеров не дадут необходимого баланса между тягой и токопотреблением. Тут надо учитывать еще один нюанс. В отличии от классических квадриков, у тинивупов желательно поддерживать обороты при зависании на месте на достаточно высоком уровне, около 45-50% газа, чтобы обеспечить хорошую маневренность и точность управления. Поэтому лучше выбрать легкие пропеллеры с узкими лопастями, пусть и не с максимальной тягой на этих моторах.
Какую раму выбрать? Под легкий тинивуп на 40-х пропеллерах есть только одна относительно нормальная рама - Happymodel Mobula7 V2 коричневатая. Собственно и эта рама - так себе вариант, не очень надежная, но других пока нет. Из всего многообразия рам под 40-е пропеллеры, она самая легкая, весит 4.2 грамма. Белая полупрозрачная тяжелее, весит 4.5 грамм. Остальные рамы весят уже непозволительно много.

Можно поэкспериментировать с рамой BetaFPV Meteor 75, срезать холдер аккумулятора, внешние перемычки. Чуть позже с ней поработаю, посмотрю, до какого веса получится обработать.
Под 31-е пропеллеры рам довольно много, есть из чего выбрать. Основные это Happymodel Mobula6, BetaFPV Meteor65, NBD Brushless Cocroach и новичок iFlight Alpha A65. У каждой есть свои плюсы и минусы. Первая - самая популярная, но мне не нравится низким расположением аккумулятора. Вторая - самая легкая, весит 3.1 грамма, но и самая хрупкая. Кольца защиты маловаты, пропеллеры часто их цепляют, даже в полете. Третья - по форме отличная, но тяжелая и из хрупкого пластика.

И последняя - по форме похожа на третью, но более легкая, весит 3.33 грамма и из отличного вязкого пластика - это мой выбор.
Какую выбрать камеру? До недавнего времени были очень популярны две AIO-камеры: Caddx Beetle и LST S2. Они с матрицей 1/4 дюйма, с передатчиком на 25мВт и максимально легкие в этом классе. Кому-то больше нравится изображение с одной, кому-то с другой, но в целом у обоих картинка отличная.

Их легко устанавливать на самодельные канопы после небольшой доработки - спиливания выступа под антенну и вывода антенны снизу вверх. Для того, чтобы завести OSD на этих камерах, достаточно разрезать нижний пин с правой стороны. Получится видеовыход с камеры и видеовход на передатчик.

У камер этого класса есть существенный недостаток - отваливается линза. Приходится потом приклеивать ее на место суперклеем, что небезопасно для линзы и матрицы. Если пары клея на них попадут, то все, камеру можно выбрасывать.

Из современных камер с матрицей 1/3 дюйма понравилась Runcam Nano 3 старого образца. Камера весит всего 1.05 грамма без проводов, дает неплохое изображение, имеет небольшую дисторсию, но избавлена от эффекта "рыбьего глаза". Производитель зачем-то взял и испортил удачную камеру, начав выпускать новые партии с другим объективом, с меньшим углом обзора.

Как-то стороной обошел камеру Foxeer Pico Razer на 1200TVL с матрицей 1/3 дюйма и с линзой 1.6мм, а на нее стоит взглянуть! Угол обзора камеры сопоставим со старой версией Runcam Nano 3, но дисторсия меньше. Зато появился небольшой эффект "рыбьего глаза".

При скромных габаритах 12x12мм, камера без проводов и наклейки весит 1.75 грамма - тяжеленькая! Как утверждает этот источник, это самая быстрая CMOS-камера. Она имеет прекрасный WDR и отличную цветопередачу.

Недавно появилась в продаже еще одна камера, заслуживающая внимания. Это Caddx Ant Lite - первая камера для тинивупов с настройками через встроенное меню. Если отпаять у нее разъемы, то можно получить вполне приемлемый вес в 1.6 грамм.
У этой камеры так же отличный WDR и настраиваемая по вкусу картинка, но угол обзора узковат - стоит линза на 1.8мм. Еще летом был анонс этой же камеры с компактным, легким объективом, как у Runcam Nano 3, но по какой-то причине эта модель не поступила в продажу, а жаль. Я бы с удовольствием отказался от других вариантов в пользу этой камеры.
В общем, мой выбор на текущий момент - это Runcam Nano 3, пусть и с новым объективом, зато самая легкая. В довесок к этой камере отлично подходит канопа от Mobula6.
Какой выбрать передатчик? Если позволяют финансы, то лучший выбор - это TBS Unify Pro32 Nano. Соперники на трассе скажут вам спасибо за такой передатчик, ибо он не будет гадить им на соседние частоты. Быстрое переключение частоты с помощью таблицы баркодов - лучшее решение для организации гонок. Да, вес передатчика меньше грамма. Есть еще один миниатюрный передатчик NamelessRC Nano400. Без антенны весит 0.7 грамма. Цена гуманна и это мой выбор.
Осталась самая важная деталь тинивупа - полетный контроллер. А как же приемники? А приемников не будет и этому есть объяснение ниже. Итак, во первых, никаких комбайнов с питанием 1-2S. У таких полетных контроллеров толстая тяжелая плата и дополнительные транзисторы в блоке регуляторов между контроллерами и силовыми ключами, которые ни разу не добавляют эффективности работы регуляторам. Эту тему рассматривал в предыдущей статье. Нужен полетный контроллер исключительно под 1S, такой, чтобы в блоке регуляторов стояла прошивка x_x_5, например O_H_5 или O_L_5. Во вторых, чем больше компонентов интегрировано на полетный контроллер, тем вся конструкция квадрика будет легче. Но здесь есть обратная сторона медали - уменьшается общая надежность полетного контроллера. Если на полетный контроллер интегрирован приемник, передатчик, блок регуляторов, то при выходе из строя одного из компонентов, менять придется весь полетный контроллер. Это следует принять и с этим смириться. Не должно быть компромисса между семейным бюджетом и расходами на хобби:) Из вышесказанного следует, что рассматривать стоит только полетные контроллеры с интегрированным приемником. Опустим тему с полноценными интегрированными приемниками, подключенными через SBUS или iBUS, сейчас таких плат и не найти, остановимся только на тех, что подключены через SPI-шину.
Рассмотрим достоинства и недостатки приемников на SPI-шине. По сути, это никакой не приемник, а просто принимающая сигнал микросхема. Обычно устанавливают чипы CC2500, A7105, CYRF6936. В зависимости от установленного чипа, полетный контроллер будет работать с тем или иным набором поддерживаемых этим чипом протоколов. Для такого приемника не требуется выделять дополнительный UART на процессоре, не требуется использовать отдельный процессор для декодирования сигнала, что экономит место на плате.

К недостаткам такого решения относится небольшой радиус действия. Это обусловлено тем, что, как правило, на входе отсутствует усилитель сигнала, антенны короткие и заслонены деталями квадрика, принятый сигнал декодируется процессором полетного контроллера, который и без этой задачи загружен обработкой данных. С другой стороны, если рассмотреть, где летают на тинивупах, это не должно быть проблемой. На тинивупе можно летать дома, в зале, на детской площадке в безветренную погоду. Да в любом месте в радиусе 50 метров от пилота. Тинивуп не предназначен для полетов на дальние расстояния или на большую высоту. Как только понимание этого придет, так сразу же исчезнет проблема с дальностью работы приемника. Еще один фактор, влияющий на дальность - передача телеметрии. Если выбрать протокол без телеметрии, то дальность приема увеличится (Frsky-D8 или Redpine). К достоинствам приемников на SPI-шине можно отнести легкость смены протокола работы. Например, для приемников на CC2500-чипе поддерживаются все вариации FrSky-протокола, Futaba S-FHSS и новейший Redpine. Код приемников интегрирован в BetaFlight и поддерживается вместе с остальными компонентами прошивки. Но надо учитывать тот факт, что код всех коммерческих протоколов не был предоставлен производителями, а был получен методом реверс-инжениринга энтузиастами. Из этого следует, что надежность связи при использовании приемника на SPI-шине вообще никто не гарантирует! Теперь живите с этим:)
Кстати, многие не знают, но в пультах на основе мультипротокольного модуля есть возможность подкорректировать дальность работы приемника в лучшую сторону параметром Freq.Fine. Для этого надо включить квадрик и понаблюдать за работой приемника.

Покрутить этот параметр сначала в одну сторону до пропадания сигнала на приемнике, запомнить значение. Затем покрутить в другую сторону так же до пропадания сигнала и снова запомнить значение. Вычислить среднее арифметическое из двух цифр и результат подставить значением параметра Freq.Fine. Например, сигнал пропал при значении -85, затем при 55. Среднее арифметическое будет (-85+55)/2=-15. Вот это значение и выставляю. Этот параметр доступен в прошивках OpenTX и Deviation.
Итак, что остается в сухом остатке? Всего несколько моделей полетных контроллеров. Самый старый из выпускаемых, но до сих пор актуальный Crazybee F3 1S. Несмотря на преклонный возраст, из этого полетного контроллера все еще можно выжать отличную производительность и задействовать RPM-фильтры, если использовать модифицированную прошивку BetaFligh-4.1.1-F3-Performance Edition.

В основе платы F303-процессор, MPU6000-гироскопы, AT7456E в качестве OSD, EFM8BB10-чипы на регуляторах и SiA517DJ-T1-GE3 - силовые ключи. Изначально на полетном контроллере был вывод под пищалку и стоял датчик тока. В последних ревизиях полетного контроллера добавились выводы PWM, UART3 и управление светодиодами.
BetaFPV F4 1S - сравнительно новый полетный контроллер. В свое время был топовым, но сейчас, похоже, снят с производства, очень жаль... Отличительная особенность - стоит усилитель сигнала перед микросхемой приемника.

Был очень легким, на борту имел только самое необходимое: F411-процессор, MPU6000-гироскопы, AT7456E в качестве OSD, EFM8BB21-чипы на регуляторах и SiA517DJ-T1-GE3 - силовые ключи. Из периферии доступен только TX2 для управления передатчиком через SmartAudio. Датчика тока нет. Изначально выпускался с EFM8BB10-чипами в блоке регуляторов, но финальная V2.2-версия была с EFM8BB21 и поддерживала RPM-телеметрию в полном объеме. Очень понравилась форма платы. Можно было спроектировать раму с небольшой диагональю и чуть большим диаметром пропеллеров при тех же габаритах квадрика.
Новинка из-за океана - NewBeeDrone Hummingbird F4 Pro. Очень интересный полетный контроллер, прямой конкурент BetaFPV F4 1S, но с отличной периферией.

Основа несколько отличается от китайских аналогов: F411-процессор, гироскоп Bosch BMI160, микросхема OSD собственной разработки, потребляющая на 75% меньше энергии, чем AT7456E, но совместимая с BetaFlight OSD, EFM8BB21-чипы на регуляторах. Марку силовых ключей опознать не удалось, но, по спецификациям полетного контроллера, они способны выдерживать ток до 12А. На плате доступны выводы двух UART-портов, установлен датчик тока. Разъемы под моторы спроектированы так, что могут быть легко отпаяны, а провода от моторов можно подпаять с торца платы. Установлен диверсити-приемник! Снизу стоят четыре управляемых цветных светодиода.
Crazybee F4 Lite стал первым бесколлекторным полетным контроллером с интегрированным видеопередатчиком. На текущий момент, он самый интересный. В первых партиях пользователи отмечали сброс настроек при очень низком разряде аккумулятора. Позже эта проблема была устранена.

Основа, как и у всех продуктов из Поднебесной: F411-процессор, MPU6000-гироскопы, AT7456E в качестве OSD, EFM8BB21-чипы на регуляторах и SiA517DJ-T1-GE3 - силовые ключи. Как и вся линейка Crazybee, полетный контроллер имеет богатую периферию. На плате выведено два UART-порта (один имеет дополнительный инвертированный RX), управление пищалкой и светодиодами, установлен датчик тока. Видеопередатчик может работать на 25/50/100мВт. Антенна видеопередатчика довольно странная, лучше сразу заменить ее хотя бы на монополь с привычной длиной передающей части в 13мм. Благодаря плотной интеграции компонентов, к плате всего-то и нужно, что подключить камеру и моторы.
Завершает список новинка BetaFPV F4 1S AIO с интегрированным видеопередатчиком на 25мВт. Впервые этот полетный контроллер появился на синевупе BetaFPV Meteor65 HD 1S, а чуть позже стал доступен в продаже.

Основа, как и у предыдущего: F411-процессор, MPU6000-гироскопы, AT7456E в качестве OSD, EFM8BB21-чипы на регуляторах и SiA517DJ-T1-GE3 - силовые ключи. В документации неправильно указана версия прошивки в регуляторах O_L_5, на самом деле стоит BLHeli_M-O_H_5-16.8. Датчика тока нет, выводов под пищалку нет. На плате стоят два цветных управляемых светодиода. На отдельной колодке под камеру BetaFPV Nano HD выведен UART2. Вывод под обычную камеру сделан JST0.8-разъемом и совместим с камерами BetaFPV C01 Pro, BetaFPV C01 и NBD BeeEye V1.
Какой бесколлекторный тинивуп выбрать для покупки? Методом проб и ошибок, пришел к выводу, что хорошо полетит бесколлекторный тинивуп весом менее 20 грамм. Если чуть больше - не страшно, грамм-полтора всегда можно срезать:) Фаворитом на текущий момент является Happymodel Mobula6 с моторами на 19000kV. Очень сбалансированный аппарат с неплохой камерой, с весом чуть больше 20 грамм, но это легко исправимо.

На второе место я бы поставил BetaFPV Meteor65 с моторами на 19500kV. Сейчас эта модель выпускается с новым полетным контроллером BetaFPV F4 1S AIO. Камеру BetaFPV C01 можно легко заменить на BetaFPV C01 Pro и получить отличную картинку.

Третье место занимает NewBeeDrone Hummingbird F4 Pro 1S. Модель подойдет тем, кому не хочется возиться с настройкой и прошивкой.

Если пересадить начинку Happymodel Mobula6 на раму Happymodel Mobula7 V2 и поставить HQ-пропеллеры на 40мм, можно получить отличный, легкий, мощный, экономичный бесколлекторный тинивуп на 75-й раме. И да, тинивуп на 75-й раме будет летать почти на минуту дольше такого же аппарата на 65-й раме при незначительной разнице в весе:)
Как облегчить бесколлекторный тинивуп? Основная идея - заменить все, что можно металлическое на пластиковое. Пластик в несколько раз легче металла. Начнем с рамы. У 65-х рам и срезать нечего, они и так достаточно легкие. У 75-й рамы Happymodel Mobula7 V2 срезаются перемычки между холдером аккумулятора и боковыми точками крепления полетного контроллера, срезается сам холдер.

Аккумулятор крепится на петлю из резинки или напечатанную из флекса за верхние поперечные перемычки рамы.
В результате размышлений понял, что у тинивупа не должно быть двух отдельных деталей: крепления камеры и канопы. При использовании этих двух элементов вес не получится уменьшить. Это должен быть один элемент. Так появилась идея выполнить крепление камеры и ее защиту одним легким плоским элементом, напечатанным на 3D-принтере из вязкого пластика: жесткого флекса или нейлона.

Крепление камеры выполнено в трех точках - это минус один металлический болтик фиксации полетного контроллера. Для лоурайдера использовал эту же технологию - согнул крепление камеры из плоской детали.

Для крепления канопы использую два вида саморезов: с широкой шляпкой M1.2x4 и M1.2x5 и с маленькой головкой M1.2x4.
Крепление моторов можно выполнить вместо металлических винтиков пластиковыми Reny M1.4x4, но, как показала практика, винтики эти совсем слабые, часто ломаются при авариях. Я нашел компромиссное решение, которое дает практически такую же экономию веса - замена двух металлических винтиков петлей из лески. Надо использовать не очень тонкую леску, лучший результат получился с леской диаметром 0.7мм. Отрезается кусок лески длиной 15см, кончики чуть сгибаются пинцетом. Леска вставляется снизу в отверстия и упирается либо в ротор мотора, либо в обмотку. Ротор мотора аккуратно проворачивается, чтобы кончик лески загнулся вышел из под ротора. Надо быть осторожнее, чтобы не повредить обмотку! Затем кончики лески вставляются в паз между отверстиями в раме и завязываются обычным узелком.

При затягивании узелок погружается в паз рамы между крепежными отверстиями и надежно там фиксируется. Потребуется тянуть за один кончик лески пассатижами, чтобы все получилось. Кончики лески обрезаются под ноль, узелок никогда не развяжется, он надежно зажат в пазу рамы. За год использования такого метода не было ни одного случая ослабления петли и уж тем более разрыва лески:)
Для особых случаев, можно попробовать заменить выводы от моторов. Вместо проводов в толстой и тяжелой силиконовой изоляции использовать провод UL10064 толщиной 30AWG в тефлоновой изоляции. Я еще так не делал, пока только планирую.
На полетном контроллере, в первую очередь, меняю все антенны. Для приемника ставлю длиной 31мм из UL10064 толщиной 30AWG. Для передатчика делаю антенну из запасной антенны для приемника Frsky R-XSR. Для этой антенны используется самый тонкий коаксиальный кабель. Делаю кончик 13мм, остальную длину подгоняю по месту. Кончик затягиваю в тонкую термоусадку диаметром 1мм. Удалять или нет разъемы с полетного контроллера - каждый решает сам. Удаление разъемов реально может помочь уменьшить вес аппарата.

В последней сборке я оставил разъемы под моторы только потому, что это тренировочная модель, не для соревнований. Соединения электронных компонентов тинивупа лучше всего делать проводом UL10064 толщиной 32AWG. Места пайки полезно промазать фиксирующим клеем для антенн, чтобы тонкие провода не обламывались в местах пайки.
Остается самая тяжелая деталь полетного контроллера - USB-разъем. Его вес 0.2 грамма. Пробовал подпиливать надфилем сверху до пинов, снимать заднюю часть, полностью удалять металлическую часть. Ни один из вариантов не понравился. Первый - слишком хлопотно и малоэффективно. Два вторых приводят к обламыванию пластиковой части разъема во время подключения кабеля. На месте производителей полетных контроллеров, я бы просто сделал в задней части полетного контроллера четыре металлизированных отверстия разного диаметра. И переходник с одной стороны с пинами, а с другой - с ответной частью USB-разъема, чтобы пины плотно вставлялись в отверстия на полетном контроллере. А чтобы все оно держалось и не вываливалось, сделать пины в переходнике выгнутыми чуть наружу и достаточной длины так, чтобы при подключении требовалось их немного сжать пальцами. Или какой-либо другой вариант, позволяющий обойтись без установки тяжелого разъема.

Или вообще придумать беспроводной интерфейс для обновления прошивки и настройки, например через bluetooth. Маленький чип будет легче массивного USB-разъема. На этом про облегчение тинивупа пока все. Если будут новые идеи - дополню заметку.
Немного фана на гонке может добавить установка легких маленьких управляемых цветных светодиодов в заднюю часть рамы. Светодиоды продаются лентой, можно отрезать любое количество и приклеить к раме клеем E-6000. Десяток светодиодов на ленте весят 0.14 грамм.

Провода для питания и управления можно взять от старых наушников. Веса тинивупу это практически не добавит, а полеты будут более зрелищные.
Какую прошивку использовать для блока регуляторов? На сегодняшний день есть четыре варианта: BLHeli_S, JESC, BLHeli_M и Bluejay. Прошивка BLHeli_S давно перестала удовлетворять современным требованиям, не имеет поддержки RPM-телеметрии и частоты работы более 24кГц. Сначала появился форк JESC. Из прошивки были удалены все протоколы управления, кроме DShot и за небольшую плату можно было получить RPM-телеметрию. Следующий форк BLHeli_M повторяет функционал JESC, но совершенно бесплатно. В последней 16.9-версии автора прошивки понесло в экспериментальные дебри, поэтому появился следующий, пока еще сырой, форк Bluejay, в котором планируют стабилизировать все полезные функции BLHeli_M. В общем, смысла платить за JESC больше нет и стоит подождать стабильного релиза Bluejay. А на сегодняшний день отлично работает версия BLHeli_M-16.8 на 48кГц. Современные версии тинивупов от BangGood (Eachine, Happymodel, Crazybee) идут с уже установленной BLHeli_M-16.8 в блоке регуляторов и настроенными RPM-фильтрами.

Можно начать с таких параметров и, если все хорошо работает, попробовать поднять тайминг на максимум.
Какую прошивку использовать для полетного контроллера? Лично для меня выбор очевиден, но многим может показаться затруднительным. На сегодняшний день есть BetaFlight и EmuFlight. В процессе финальной разработки находится QuickSilver - прошивка, основанная на NFE SilverWare, но под современные процессоры.

Сначала расскажу, почему я игнорировал полетные контроллеры под NFE SilverWare, в частности BetaFPV Lite 1S? Во первых, чтобы его хорошо настроить, потребуются три программатора: ST-Link V2, USB-FTDI-адаптер и Arduino Nano. Первый для прошивки процессора, второй для прошивки и настройки блока регуляторов, третий - для прошивки и настройки OSD. Ко всему этому надо развернуть среду программирования Keil uVision5 с платными модулями для компиляции под EFM8BB21-процессор. Ладно, допустим все это есть. Во вторых, надо потратить массу времени на подбор PID-ов, фильтров и прочих параметров прошивки NFE SilverWare, чтобы более-менее заставить хорошо лететь тинивуп. Компания BetaFPV выпустила форк этой прошивки с поддержкой OSD и чуть более улучшенной поддержкой бесколлекторных моторов. Но прошивка так и остается сырой, местами глючит, при сохранении параметров из меню окирпичивает процессор. У меня имеется прекрасно настроенный тинивуп с полетным контроллером BetaFPV Lite 1S, но процесс настройки утомил. Раз 20-30 перепрошивал процессор, прежде чем добился приемлемого полета квадрика. На заре появления полетного контроллера BetaFPV Lite 1S, я принимал активное участие в бета-тестировании и помогал в поиске и устранении багов прошивки, но идея использовать NFE SilverWare для бесколлекторных тинивупов так и не прижилась. И этому есть объяснение. Что было хорошо для коллекторных тинивупов, для бесколлекторных так не работает. В отличие от коллекторных, у бесколлекторных моторов можно затормозить вращение, разгоняются они быстрее, крутящий момент больше, фильтровать шумы надо иными алгоритмами. Все эти проблемы должна была устранить прошивка QuickSilver, но когда она выйдет - одному NFE известно. Да и не стоит ждать ее, как панацеи. Сейчас EmuFlight летит прекрасно, туда уже бэкпортированы некоторые идеи из QuckSilver. Но... Есть одно жирное "но", которое останавливает меня от использования EmuFlight. Во первых, EmuFlight основана на кодовой базе BetaFlight версии 3.5.x, а разработка BetaFlight давно ушла вперед. Во вторых, система с обратной связью "RPM-телеметрия - RPM-фильтры", реализованная в BetaFlight, ставит эту прошивку на совсем другой уровень, позволяя подстраивать фильтрацию шумов динамически, очень точно и избирательно. В третьих, в BetaFlight реализован самый быстрый протокол управления Redpine, которого нет в EmuFlight, но ожидается поддержка в QuickSilver.

В общем, мое мнение: EmuFlight - для фристайлеров, BetaFlight - для гонщиков, QuickSilver - для ждунов:)
Где брать настройки? В каждом из обзоров я привожу дампы своих настроек. Используйте их, как опорную точку. Есть отличные рекомендации по настройке от канала UAVTECH. Если и этого недостаточно, есть рекомендации Project MockingBird для тинивупов.
В каком режиме лучше летать на тинивупе: Acro, Stab или Racemode? Вопрос требует понимания того, как работает каждый из режимов. В Acro-режиме стик "Roll/Pitch" управляет вращением квадрика по этим осям, а скорость вращения задается степенью отклонения стика. Вращение прекращается, если установить стик в центральное положение. И не важно в каком положении оказался квадрик, хоть вверх ногами, он будет пытаться сохранить заданное положение относительно осей, а не в пространстве. В пространстве в этот момент он может лететь в абсолютно любом направлении. Скорректировать его положение можно движением стика в обратную сторону. Посмотреть работу Acro-режима можно в BetaFlight-конфигураторе на вкладке приемника. В Stab-режиме стик "Roll/Pitch" управляет наклоном квадрика по осям относительно горизонта, а угол наклона задается степенью отклонения стика. Максимальный угол наклона задается в настройках квадрика. Соответственно, чтобы задать некое фиксированное положение квадрика, надо наклонить стик и удерживать его в этом положении. Квадрик выравнивается в горизонт и останавливается на месте, если установить стик в центральное положение. Принципиальная разница между режимами в том, что в Stab-е при движении стика задается некий угол наклона в диапазоне от нуля до заданного максимального значения, а в Acro - скорость наклона или вращения. Racemode-режим - комбинация Acro и Stab-а. Впервые появился в прошивке NFE SilverWare, затем перекочевал в остальные. В Racemode-режиме по оси Roll управление идет в Stab-е, а по оси Pitch - в Acro. Этот режим позволяет не ограничивать квадрик при движении вперед максимальным углом наклона, но позволяет сохранить стабилизацию при наклонах влево-вправо. Так вот, если вы начинающий пилот и планируете летать только на тинивупах, то попробуйте все режимы и летайте в том, какой вам больше всего нравится. Но, если вы хотите летать на других моделях, например гоночных квадриках, самолетах, 3D-вертолетах, то вам придется освоить Acro-режим и отдать ему значительно бОльший приоритет на тренировках. Потому что пилот, летающий только в Acro, легко полетит в Stab-е, а пилот, летающий только в Stab-е практически мгновенно воткнет модель в землю, попробовав взлететь в Acro. И еще момент, в Stab-е, даже при небольшом ветре, летать не очень комфортно и есть вероятность, что простой порыв унесет тинивуп в известном направлении и достаточно далеко:)
Надо ли использовать симулятор, чтобы научиться летать на тинивупе? Это по желанию. Тинивуп сам по себе, как симулятор. Многие начинающие пилоты боятся разбить модель. Не бойтесь, при взлетном весе около 30 грамм, если вовремя дизармить аппарат, то ничего с ним не случится. Даже при падении с большой высоты. Но симулятор все равно может пригодиться, чтобы наработать первичные рефлексы управления квадриком, чтобы не думать как и куда отклонять стики, какой тумблер дергать в тот или иной момент. Из бесплатных симуляторов отлично подойдет TinyWhoopGo, там только регистрация требуется. Зато можно тренироваться по сети с друзьями.
На этом, пожалуй, закончу первый выпуск "Тинивупных заметок". Если подобный формат вам понравился, то, как только накопится достаточное количество неосвещенных вопросов, сделаю еще один выпуск. Задавайте ваши вопросы в VK-группе, присылайте в личку. Не забывайте о поддержке:) И кстати, я запрещаю использование этого материала на других ресурсах.