
Почему бы не использовать просто экшен-камеру? Это же удобнее, можно поставить ее на любой квадрик. Экшен-камера есть и, как показало время, ставлю ее только на один единственный квадрик. Тогда какой смысл возить дополнительные 70-80 грамм веса, если можно сам квадрик превратить в летающую экшен-камеру? Поэтому выбор и пал на камеру RunCam Split V2 в качестве курсовой и для съемок.
Краткие характеристики камеры RunCam Split V2:
- Угол обзора: FPV 130° / Запись 165°
- Разрешение записи: 1080@60fps / 1080@30fps / 720@60fps
- Формат файлов: MOV
- Разрешение матрицы: 2Мп
- Видео-выход: NTSC (720*480) / PAL (720*576), переключаемый
- Вывод звука: есть
- Интерфейсы: micro-USB / UART
- Максимальный поддерживаемый объем карты памяти: 64ГБ
- Поддержка WiFi: есть, внешний модуль
- Габариты: плата 38x38мм / камера 22x20мм
- Напряжение питания: 5-17В / 5В(USB)
- Потребление тока: 650мА @5В / 270мА @12В
- Вес: 21г / 23г (с WiFi-модулем)

Вот весь набор: камера с основной платой, WiFi-модуль, инструкция, верхняя металлическая крышка, скоба для установки камеры, переходник с 22мм на 28мм, запасной длинный шлейф для соединения камеры и основного модуля, набор проводов в силиконовой изоляции и набор крепежа. Основная плата была заклеена парой стикеров с подписями выводов и коннекторов.

Сама камера имеет габариты 22x20.5мм. С обратной стороны ничего нет, кроме щели для шлейфа в задней крышке.

Внутри камеры установлена плата с матрицей и с небольшим количеством элементов с обратной стороны. Хорошо видно широкоформатную CMOS-матрицу. Кстати, не нашел в продаже запасных корпусов и матриц, а они наверняка потребуются!

Объектив камеры с инфракрасным фильтром. Кстати, в отличии от первой версии, RunCam Split V2 уже идет с установленным объективом RC25G от камеры GoPro.
WiFi-модуль имеет оригинальный разъем, перепутать с microUSB не выйдет. Сверху есть наклейка с QR-кодом. Если его отсканировать, то можно узнать MAC-адрес модуля.

Основная плата имеет стандартные посадочные отверстия 30.5x30.5мм. Во второй версии камеры исправлена одна из основных проблем первой версии - было невозможно одновременно подавать питание на камеру и подключать USB-разъем. Теперь это можно делать одновременно. Более того, на камеру можно подавать напряжение не только 5В, как в первой версии, а 5-17В прямо от аккумулятора. Плата имеет собственный стабилизатор напряжения.

С верхней стороны стоит процессор, слот для SD-карты, микрофон и пищалка. С нижней - USB-коннектор, разъем для подключения WiFi-модуля, разъем для шлейфа, кнопка включения WiFi и выбора режима.
Для управления камерой с телефона потребуется отдельное приложение. Ссылку на него можно найти на официальном сайте. Там же есть и документация, и свежая прошивка для камеры.
Установил WiFi-модуль и попробовал подать питание на камеру через USB-разъем, подключив к компьютеру Камера включилась, но никакой реакции на кнопки не было. Не мог понять в чем дело, пока не обратил внимания, что в компьютере появляется новый накопитель:) Ага, вставил SD-карту и увидел ее содержимое. Отлично! Попытался включить WiFi и не смог. Только через некоторое время стало проясняться. Камера может работать либо как накопитель при подключении к компьютеру, либо как просто камера при подаче питания. Подключил камеру к зарядному устройству от телефона и появилась реакция на кнопки управления, заработал WiFi! Схема всех выводов и кнопок была в инструкции.

Кнопка 'WiFi', которая ближе к краю платы, включает/выключает WiFi, а если ее подержать, то переключает режимы работы камеры. Тройное нажатие в течении двух секунд на эту кнопку выполняет сброс настроек камеры. Кнопка 'Power' запускает и останавливает запись или делает снимок, в зависимости от режима. Если нажать обе кнопки одновременно, то питание камеры отключится. Было бы полезным реализовать функцию автоматического включения WiFi при подключении WiFi-модуля, но такой нет.
Подключился к камере через телефон. На главном экране есть выбор баланса белого, экспозиции, угла обзора, метода замера экспозиции, поворота изображения на 180 градусов.

Под предварительным просмотром доступен выбор разрешения и частоты съемки, включение режима замедленной съемки. Остальные настройки вынесены в отдельный диалог.

Сделав предварительные настройки, стал примерять камеру RunCam Split V2 на квадрик. Схема подключения обнаружилась в документации.

При попытке установить переходник на камеру, обнаружил, что в комплекте нет маленьких болтиков М2x3 с головкой небольшого диаметра. Пришлось искать их самостоятельно, а потом еще и по длине подгонять.

С монтажом особых проблем не было, но надо было поставить основную плату максимально низко, иначе раму квадрика было бы не собрать.

Все спаял, согласно схеме из документации. Очень удобно расположены площадки для подключения. На камеру подал питание от стабилизатора на 9В, как позже выяснилось, не зря. Кнопки управления камерой оказались за силовым разъемом, что не очень удобно. Но ими пользоваться почти не придется, пережить это можно.
Раму собрал не без проблем. По высоте места было катастрофически мало. Даже ремешок для фиксации аккумулятора пришлось побрить:) Зато под полетным контроллером было свободно целых 3мм! Все из-за высоких мягких стоек.

Очень полезной оказалась металлическая накладка над основной платой. Не даст повредить детали на плате и фиксирует SD-карту от выпадения при аварии. Случалось, что теряли на полетах SD-карточки, вставленные в экшен-камеру, только один раз удалось найти:)

Камера плотненько встала в штатное крепление рамы: за объектив и болтиками по бокам. Пришлось немного доработать верхнюю карбоновую крышку рамы, чтобы ничего лишнего в кадр не попадало.

Итоговый вес квадрика получился 370 грамм. Ожидаемо, примерно столько он и раньше весил.
Осталась настройка управления камеры с пульта. В прошивке BetaFlight полностью реализован протокол управления камерой RunCam Split V2. На официальном сайте нашел небольшое руководство. Для управления камерой буду использовать UART5, его и выбрал в портах еще при установке полетного контроллера Matek F405-AIO.

В пульте назначил три тумблера на AUX4-AUX6 для управления камерой. В настройках BetaFlight задал соответствующие каналы. В общем, это все:) Очень просто.
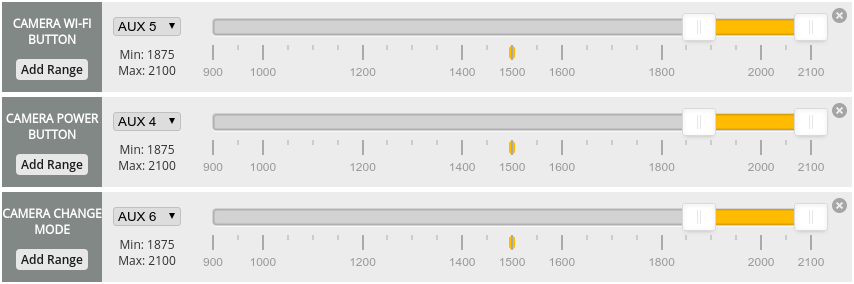
При выборе режима работы, камера переключается на режим показа изображения 4:3, 16:9 или включает меню настроек. Бегло прошелся по всем настройкам камеры. Все тоже самое, что было доступно с телефона из приложения через WiFi-модуль.
Провел тест на задержку работы камеры в FPV-режиме при записи видео. Тест не точный, приблизительный, но все же дает представление о скорости работы камеры.

Получилось 57 миллисекунд. На мой взгляд, многовато. По другим тестам, у того же Оскара, получается 51 миллисекунда. В полете это никак не ощущается, никакого дискомфорта от задержки нет.
Попробовал сделать тестовую запись видео, немного подлетнув в комнате. Все получилось отлично, желе на видео нет! По углам записи остались небольшие кусочки рамы и пропеллеры. Чтобы все это убрать, надо выдвинуть камеру немного вперед. Как только появится в продаже матрица и корпус камеры, так сразу и переделаю. А пока страшно, рама хоть немного, но защищает линзу от ударов:)

Остались уличные испытания и сравнение с экшен-камерой Xiaomi Yi. День для этого выдался пасмурный, по другому сейчас редко бывает, зима все таки, хоть и крымская:)
Полет вообще ни о чем! И этому есть объяснение. Картинка с камеры была, прямо скажем, не очень. Темная какая-то, деталей вообще было не видно, все сливалось. Шли ужасные помехи, летал просто на ощупь и по памяти, ибо место знакомое. Несколько раз терялся, не понимал куда лететь, падал, не мог ориентироваться по высоте. Помехи шли не из-за плохой передачи или приема, помехи шли непосредственно с камеры. Это хорошо видно по картинке.

Данные OSD на месте, а за ними жуткие помехи. Я специально пробовал подключать только камеру к аккумулятору и снимать с нее видео на монитор по проводу - помехи были. Но если питать камеру от USB-зарядки телефона - помех нет. Ежу понятно, что проблема во встроенном стабилизаторе напряжения на камере. Нашел на эту тему заметку на официальном сайте RunCam. Там рекомендуют вешать на вход питания конденсатор на 1500-2000мкФ. Куда его вешать-то, он же огромный!
Еще одна проблема - камера не всегда стартует при подаче питания. Не загружается. Проблема возникает не часто, так что жить с ней можно. Написал о проблемах в официальную поддержку RunCam:
My new Split V2 is noisy interference via FPV-out, if powered from battery. If powered from phone charger, then work without interference. I read the articles from support, but it did not help me. I put the capacitor on the power input, but it did not help me. The amount of interference is not diminished. I only use the camera and the battery, and is connected to a video input from monitor. Incidentally, sometimes the camera does not turn from the first time by the battery. Maybe BEC of the camera is damaged. What should I do?
На следующий день получил ответ:
Sorry about this situation. Yes, it may cause interference if it is powered directly by lipo. Have you tried to add 2000uF low ESR capacitors on both the negative and positive of your Split?

If it doesn't help, you can power by filtered output BEC/FC/PDB 5V/12V.
Incidentally, sometimes the camera does not turn from the first time by the battery. We will try as early as possible to figure it out.
Рекомендуют питать камеру от внешнего стабилизатора напряжения, что уже сделано. Камера питается от BEC 9В, но это не помогает. Остается последний вариант - питать камеру напрямую через USB-разъем от BEC 5В. Если это решит проблему с помехами, то что делать с темной картинкой на видео-выходе? В видео я совместил записи с DVR и камеры, чтобы было видно, на сколько обрезается угол обзора и как картинка отличается одна от другой.

На FHD-записи картинка сочная, четкая и светлая, а на видео-выходе темная и мутная. Вообще ничего не разглядеть!
Записывает камера RunCam Split V2 лучше, чем Xiaomi Yi. Видна отличная работа WDR. Когда еще собирал квадрик, то обратил внимание, что дома даже видно в деталях включенную лампочку на потолке! Угол обзора такой же, как у Xiaomi Yi, но оно как бы имеет большую выпуклость, бочкообразность картинки больше. Мне так больше понравилось:) Звук пишется отлично, без посторонних шумов, что хорошо заметно в сравнении с Xiaomi Yi, где звук просто ужасный.
Но и при FHD-записи не обошлось без проблем. Если посмотреть в правый верхний угол, то хорошо заметны какие-то посторонние полосы, которых быть не должно.

Эту проблему отмечают многие пользователи. Проявляется на светлом фоне. Говорят, что обновлением прошивки это не вылечить.
Кстати, полетный контроллер Matek F405-AIO полетел ожидаемо отлично и без проблем. Осталось только поднастроить PID-ы. По моему, его сняли с производства и заменили на Matek F405-CTR, а зря. У последнего зачем-то поставили старые гироскопы MPU6000 вместо быстрых ICM20602.
Подводя итог, скажу, что и второй блин у RunCam вышел комом. Не буду пока потрошить квадрик и менять камеру, подожду третьей версии. Может в ней будет меньше проблем. Идея-то отличная, но реализация пока хромает...








































