Попал ко мне в руки очень интересный гоночный квадрик - Foxeer Caesar. Приобрел его друг и предоставил мне на обзор, за что ему респект и уважуха:) С первого дня появления этого аппарата, активно топил за него, так как квадрик нашпигован вкусняшками по самое некуда! По моему мнению, это самый годный гоночный квадрик из выпускаемых серийно. Именно гоночный - не путать со всякими дальнолетами или фристайловыми сборками:)

Основные характеристики Foxeer Caesar:
- Рама: Foxeer Caesar 5" 200мм T700
- Полетный контроллер: Foxeer Mini F722 V2 Pro
- Регулятор: Foxeer Mini Reaper 45A 128K
- Камера: Foxeer Predator 5 Nano, black, pad version, 14x14мм
- Передатчик: Foxeer Reaper Nano
- Моторы: Foxeer DATURA 2207.5 1950kV
- Антенна: Foxeer Micro Lollipop UFL
- Пропеллеры: Foxeer Dalprop Cyclone T5146.5
Многие гонщики скажут что-то типа: "Да можно собрать аппарат и получше!". Можно, только почти на сто процентов уверен, что он будет состоять практически из тех же комплектующих, совокупная стоимость которых будет значительно выше, чем стоимость этой модели.
Упаковка зачетная. Стильная коробочка с мягкой прокладкой под форму квадрика. Прямо как дорогой телефон упаковано:)

Комплектация такова, что есть все, что необходимо для быстрого запуска: квадрик, два ремешка, комплект пропеллеров. Требуется только установить приемник.

Приятным сюрпризом было обнаружить в комплекте адаптер Foxeer Reaper Nano VTX Extension Board для передатчика и приемника. Такой адаптер друг приобретал еще и дополнительно - не пригодился:)
Сам квадрик Foxeer Caesar сделан очень добротно. Все резьбовые соединения собраны с локтайтом. Карбон рамы обработан великолепно. Детали из TPU-пластика вполне сносного качества, но такая крупная компания могла бы себе позволить и литые детали, а не напечатанные на 3D-принтере.

К пайке элементов претензий нет - все на уровне. Показались длинноватыми выводы от моторов, но тут на вкус и цвет... Кто-то оставляет такой запас проводов, кто-то паяет впритык. Какой вариант лучше - каждый решает для себя сам.

Удивил довольно большой просвет между нижней и средней пластиной рамы. Так как лучи рамы упираются сами в себя попарно, то центральной "кости", как у Five33 Switchback Pro, нет. Ремешок в такой зазор пролетает со свистом!

Порадовали выводы под приемник. Впервые вижу, чтобы провода были подписаны:) Не порадовали незащищенные выводы от моторов - потребуется установка дополнительной защиты на лучи.

Снизу на раме приклеена мягкая фигурная резиновая подкладка под аккумулятор.

Отдельно хочу отметить стоковые ремешки шириной 20мм. Уже имел возможность познакомиться с ремешками от Foxeer, только шириной 15мм - это самая годная годнота! Эластичные, прорезиненные, прочные, прошитые, с цельной металлической скобой - просто песня:)

В комплекте ремешки разной длины: 220мм и 250мм под различные аккумуляторы.
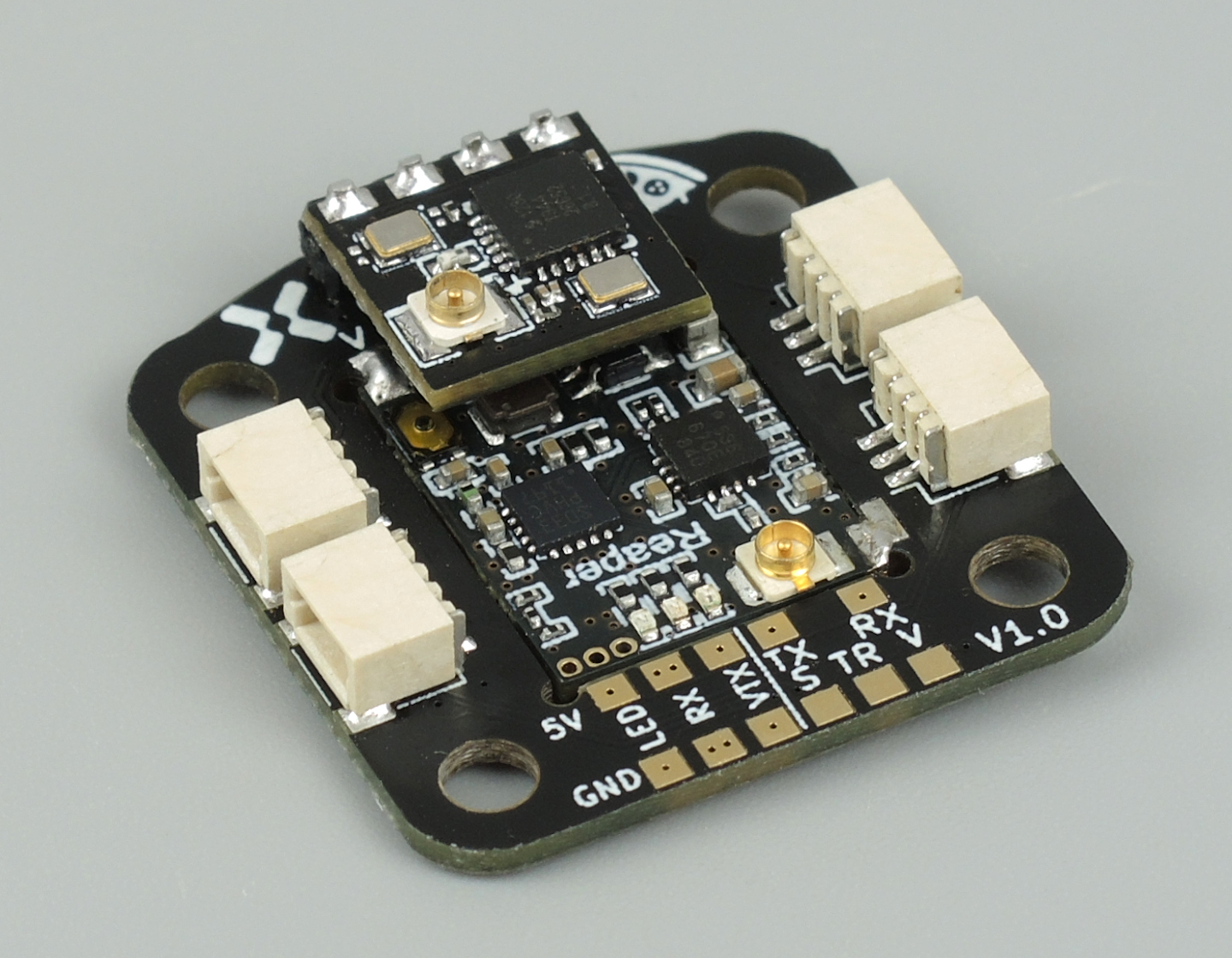
Неожиданный подарок - дополнительную плату Foxeer Reaper Nano VTX Extension Board можно установить третьим этажом в стек, если планируется использовать приемники типа "TBS CrossFire/Tracer", "ImmersionRC Ghost" или "ExpressLRS", что я и сделаю ниже. Так же в плюс возможность установить управляемые светодиоды.

Питание на плате раздельное для приемника, передатчика и светодиодов, что позволит получать питание приемнику при подключении полетного контроллера к компьютеру, а питание передатчика и светодиодов будет осуществляться только после подключения аккумулятора.

Стоковые пропеллеры Foxeer Dalprop Cyclone T5146.5 пригодятся только для первого старта и первичной настройки. Срок их жизни ограничен одной тренировкой:) Тут уж каждый сам выбирает, на каких пропеллерах будет гонять.
Переходим от аперитива к главному блюду - буду частично потрошить новый квадрик! Во первых, рама. Не буду с нее все снимать, чтобы сделать фото, просто расскажу немного.

Рама Foxeer Caesar 5" 200мм T700 не просто нарезана, как большинство гоночных рам, а отфрезерована на очень недешевом оборудовании, если судить по ее качеству. Лучи рамы симметричны сверху и снизу и все взаимозаменяемы. Обработка лучей просто потрясающая! Все три пластины так же отфрезерованы не хуже. Проработаны все углубления, нигде не обнаружил ни скола, ни увода фрезы, как это бывает на недорогих рамах. И везде максимально аккуратные фаски - перфекционисты будут довольны:) Рама спроектирована под стек 20x20мм, диагональ 200мм, правильный крест, алюминиевые стойки высотой 25мм. На лучи можно установить моторы только с посадочными 16x16мм. Лучи толщиной 5мм, нижняя и средняя пластины по 2.5мм, верхняя 2мм. В спецификации указан вес 68 грамм без TPU-деталей. Отдельно отмечу материал рамы. Это T700-карбон с Toray-плетением - прочный, сухой, с малым содержанием смолы. И да, на ощупь рама более жесткая на изгиб и кручение, чем мой текущий фаворит Five33 Switchback Pro.

Моторы Foxeer DATURA 2207.5 1950kV впечатляют своим качеством - не придерешься. Цельный ротор, титановый вал, тонкие и легкие магниты, отличные подшипники. Зазор между статором и магнитами даже меньше, чем у моих фаворитов RCINPower WASP Major 22.6-6.5 на 1860kV! С таким легким статором и не тугими магнитами динамика на разгон-торможение будет самое оно. Это позволит получить максимальный контроль на трассе. По соотношению мощность-обороты значения в 1950kV под 6S будет более чем достаточно. На компактных трассах можно будет использовать пропеллеры с шагом 3.5 дюйма, а на трассах с протяженными участками можно поставить пропеллеры с шагом 4.3-4.6 дюйма и при этом не переживать, что аккумулятор вздуется и отправится к праотцам.
Медленно откручиваю винтики и снимаю верхнюю пластину. Винтики поддаются с трудом, чувствуется наличие локтайта. Передатчик Foxeer Reaper Nano через термопрокладку закреплен к верхней пластине стяжкой. Да так удачно, что и разъем антенны зафиксирован. Положение передатчика подобрано так, что кабель антенны не выгибается. Даже если антенну разобьет - разъем на передатчике не пострадает. Даже жалко разбирать все это, чтобы поставить адаптер. Придется жесткий кабель антенны как-то загибать неудобно.

Про передатчик Foxeer Reaper Nano могу сказать, что производитель позиционирует его, как отличный вариант для коллективных полетов, с мягким включением, минимальным уровнем паразитных гармоник, низким энергопотреблением. Передатчик управляется по tramp-протоколу, мощность регулируется в диапазоне 25/100/200/350мВт.
Некоторой неожиданностью было обнаружить установленный полетный контроллер Foxeer Mini F722 V2 Pro. Изначально в анонсах квадрика фигурировала неPro-модель Foxeer F722 V2 Mini. В общем, разница по функционалу между ними небольшая, просто у Pro-версии плата несколько больше и все контакты выведены удобно, плюс есть возможность управлять питанием передатчика. Сейчас эту версию полетного контроллера уже не выпускают по причине снятого с производства гироскопа MPU6000. Его заменили на BMI270 и выпустили эти же версии с индексом V3: Foxeer Mini F722 V3 Pro и Foxeer F722 V3 Mini. Кстати, и прошивки у них отличаются. Для V2-версии таргет FOXEERF722V2, а для V3-версии - FOXEERF722V3, не перепутайте! Полетник Foxeer F722 V2 Mini используется на всех гоночных квадриках как у меня, так и у друзей, и менять его на что-либо другое нет никакого смысла - он просто лучший:)
Про камеру Foxeer Predator 5 Nano и сказать-то особо нечего. Самая топовая для гоночного квадрика, другой альтернативы нет! Установлена версия в черном корпусе, без разъема и это хорошо - нечему вываливаться после очередного не критичного краша. Угол камеры в холдере может регулироваться в небольших пределах, где-то от 45 до 55 градусов.
При внимательном осмотре обнаружился первый "косяк" - удлиненный наращиванием минусовой провод от полетного контроллера к камере - видимо при сборке рубанули лишнего.
Легкими движениями пальцев раскручиваю гайки стека и нежно снимаю полетный контроллер с длинных алюминиевых винтов. А под ним находится блок регуляторов Foxeer Mini Reaper 45A 128K - самый жыр! Сейчас эту версию заменила модель на F4-процессорах - Foxeer Reaper F4 Mini 45A 128K. По опыту могу сказать, что регуляторов на 45А более чем достаточно, на 60А - это уже с избытком для гоночки.

Силовые провода толщиной 12AWG заканчиваются качественным XT60-разъемом от Amass. На входе установлен конденсатор на 650мкФ/35В. Вот в этом моменте у меня созрела претензия. Конденсатор никак не зафиксирован, просто припаян на тонких ножках. Это проблема, которая обязательно всплывет в самый неожиданный момент. При крашах у конденсатора может надломиться одна из ножек и при следующем подключении питания из-за скачка напряжения может выгореть почти вся электроника. Как минимум, один такой стек (не Foxeer) с выгоревшим полетником, приемником, частично выгоревшими процессорами на блоке регуляторов уже лежит в моей коллекции. Причина - вовремя не заметили обломившуюся ножку конденсатора.
Отпаиваю передатчик, переставляю его на плату расширения и добавляю приемник Happymodel EP1. Пока выглядит красиво, а вот потом...
Меняю алюминиевые винты крепления на стальные длиной 25мм и собираю стек. Перед этим вывел с нижней части полетного контроллера провода для работы управляемых светодиодов. Да, монтаж получается очень плотный. Надо было объединить питание светодиодов и передатчика.

Еще случилась проблема с антенной передатчика. Ее кабель ни разу не гибкий, а зафиксировать его как-то надо. Не придумал ничего другого, кроме как бросить поверх полоску пластика по диагонали и зажать гайками стека.
Устанавливаю верхнюю пластину и приступаю к настройке. В блоке регуляторов стояла прошивка BLHeli-32.8. Обновил до версии 32.9. Из настроек, только включил максимальную частоту импульсов "By RPM", остальное пока оставил по умолчанию.

В полетном контроллере стояла стабильная версия BetaFlight-4.2.11. В настройках почти все было по дефолту, только выставлены UART-порты и забита VTX-таблица. Вот файл с этими настройками. Очень удачно вышел релиз BetaFlight-4.3.0 - его и залил. Интересно, как полетит:)

Кроме базовых настроек, других не делал. Выставил свои расходы, а PID-ы и фильтры оставил по дефолту - это потом. Получилось как-то так.
Видео полета будет чуть позже, не успели протестировать квадрик на трассе.
Подведу предварительные итоги. Рама, полетный контроллер, блок регуляторов, камера, моторы, антенна - лучше ничего и не надо. Передатчик еще предстоит протестировать, штука новая, неизведанная, но многообещающая. Дополнительная плата добавила проблем с монтажом, без нее было лучше. Если бы не разъемы под установку светодиодов, то и не ставил бы ее. В комплекте с этой платой не было удлиненных винтов под стек - пришлось выискивать самому. К существующим, но решаемым, проблемам отнесу не зафиксированный конденсатор, отсутствие защиты проводов моторов на лучах, и, как ни странно, длинный силовой провод. С силовым надо что-то делать. Он не зафиксирован и при краше велика вероятность вырвать площадки на блоке регуляторов. Очень неудобно подключать аккумулятор - сложно расположить силовые провода так, чтобы они не попадали в плоскость вращения пропеллеров. В процессе настройки выявил еще косяк - не работает функция "Camera Control", хотя для связки "полетник и камера от Foxeer" должно работать "из коробки". Работает только эмуляция кнопок "вверх-вниз" навигации по меню камеры, остальные надо подбирать значениями параметра "camera_control_button_resistance".
В целом, пусть и с небольшими проблемами, Foxeer Caesar - лучший гоночный аппарат на текущий момент из производимых серийно. Цена с купоном BGRURacing на Banggood составляет сейчас 18325 рублей - это просто халява, учитывая совокупную стоимость его составляющих. Тем более, это версия с уже новым блоком регуляторов на F4-процессорах. На Aliexpress значительно дороже получается. Мое мнение - надо брать:)