В этот же период будет работать колесо фортуны, где можно выиграть купон на скидку до 25%! Для этого надо зарегистрироваться на сайте, зайти на главную страницу и подождать появления колеса фортуны сбоку:)
В разделе "распродажа" обещают скидки до 90%! Товаров там немного, но может кому что и приглянется.
Наиболее лояльным клиентам компания подарит купон на 20% скидку и бесплатный подарок!
Если вы делаете заказ в период с 26-го по 30-е ноября, то есть шанс выиграть ценные призы! Всего компания подготовила 100 призов с различными ExpressLRS-компонентами.
Призеры выбираются случайным образом ежедневно. Стоимость приза варьируется от суммы заказа. Больше заказов - больше шансов на выигрыш!
При любом заказе с 5-го по 30-е ноября начисляются удвоенные betafpv-пойнты. Эти пойнты можно использовать для частичной оплаты следующих заказов.
Более подробно про использование betafpv-пойнтов можно почитать здесь.
Для всех желающих есть шанс выиграть что-нибудь интересное, если принять участие в конкурсе от BetaFPV!
Условия конкурса стандартные: подписка на BetaFPV в facebook, лайкнуть и сделать репост этого поста, в комментариях к посту отметить троих друзей.
Из наиболее интересного хочу отметить новый тинивуп на ExpressLRS - BetaFPV Meteor65 Pro на 65-й раме под 35мм-пропеллеры от Gemfan. По совокупности параметров должна быть золотая середина между тинивупами на 31-х и 40-х пропах.
Новый ExpressLRS-модуль под JR-слот на 2.4ГГц, с OLED-экраном, джойстиком, активным охлаждением и подсветкой обещает в дальнейшем быть очень интересным. Пока есть некоторые ограничения по работе джойстика и экранного меню, но компания обещает исправить все косяки к выходу ExpressLRS-2.1.
Приятным дополнением будет и новый ExpressLRS-приемник BetaFPV Lite на 2.4ГГц с керамической антенной - прямой конкурент Happymodel EP2. Габариты приемника 10x10мм, вес 0.47г. В отличие от BetaFPV Nano, приемник не имеет усилителя мощности, поэтому на дальнюю работу телеметрии не стоит рассчитывать, да и не для того он предназначен. Это модель для тинивупов, зубочисток, гоночных квадрокоптеров и других легких аппаратов.
Надеюсь, что этот пост поможет кому-нибудь совершать выгодные покупки на сайте BetaFPV в период распродажи!
На рынке комплектующих для тинивупов не так много производителей, все их прекрасно знают. Когда появляется кто-то новый, то возникает естественное желание попробовать его продукцию, сравнить с конкурентами. По этой причине взял на обзор новую зубочистку Flywoo Firefly. В ее составе почти все комплектующие собственного производства Flywoo.
Встроенный видеопередатчик на 25/50/100/200/250мВт
Вес без силового провода и антенн 4.2г
Квадрик приехал в пластиковом контейнере, который пригодится для хранения мелочевки.
Внутри все упаковано на отлично. Даже саму зубочистку запаяли в пленку!
В контейнере нашлось два комплекта пропеллеров, отвертка и приличная кучка запасных винтиков.
Сам квадрик Flywoo Firefly - типичная зубочистка, сделанная в форме бабочки. Не знаю, уместно ли с такой формой говорить про диагональ рамы, но расстояние между моторами составляет 74мм.
Общий вес зубочистки 20.4г - очень неплохо. По факту, можно еще подрезать вес и вписаться в 20 грамм - оптимальный вес для квадриков с такими моторами.
Оригинально реализована защита USB-разъема полетного контроллера - в вырезе крепления камеры. Камера держится за объектив, что не есть хорошо.
Вероятность оторвать объектив от камеры при авариях очень высока. Полетный контроллер установлен на винтиках с потайной головкой, поэтому нижняя часть квадрика получилась плоская, без выступов - аккумулятор будет легко установить.
Аккумулятор фиксируется петлей из TPU-пластика. Предполагается использовать аккумуляторы на 450-550мА/ч, но таких у меня уже давно нет. Попробую полетать с аккумуляторами на 300мА/ч.
В этой зубочистке интересны детали. Разбираю:) Рама из карбона толщиной 1.5мм, весит 2.43г. Не знаю, проживет ли она долго. У меня очень негативное отношение к использованию карбона для маленьких квадриков. В новых версиях рамы производитель переработал центральную часть так, что появилась возможность устанавливать аккумулятор вдоль или поперек рамы на выбор.
Напечатанные детали выполнены из классического жесткого TPU-пластика. Вес крепления для камеры 1.13г, вес петли для фиксации аккумулятора 0.12г.
Новые двухлопастные Gemfan-пропики на 40мм выглядят многообещающе. По форме лопасти и шагу очень похожи на мои любимые Azi-пропики. Вес комплекта 0.96г.
Моторы у Flywoo Firefly собственного производства. Типоразмер 0802.4 на 16500kV, выходной вал 1мм. Магниты туговаты, а значит не стоит ожидать от моторов быстрого отклика на управление. Как и у большинства моторов такого размера, в качестве подшипников стоят латунные втулки. При разборе обнаружилось, что между ротором и статором стоит всего одна тефлоновая шайбочка. Между стопорным кольцом и латунной втулкой ничего нет, то есть стопорное кольцо будет обтираться прямо о втулку.
Сверху нет стопорного кольца, но диаметр вала в этом месте составляет 1.8мм - это шляпка, что не даст валу провалиться вниз при замене пропеллеров. Моторы по конструкции без цельного ротора, поэтому стоит ожидать, что кольцо с магнитами может сползать вниз при авариях. Выходы обмоток заведены на отдельную маленькую плату под статором. Выводы моторов легко заменить, если будет обрыв. Вес одного мотора 1.9г с выводами, вес всех моторов 7.6г.
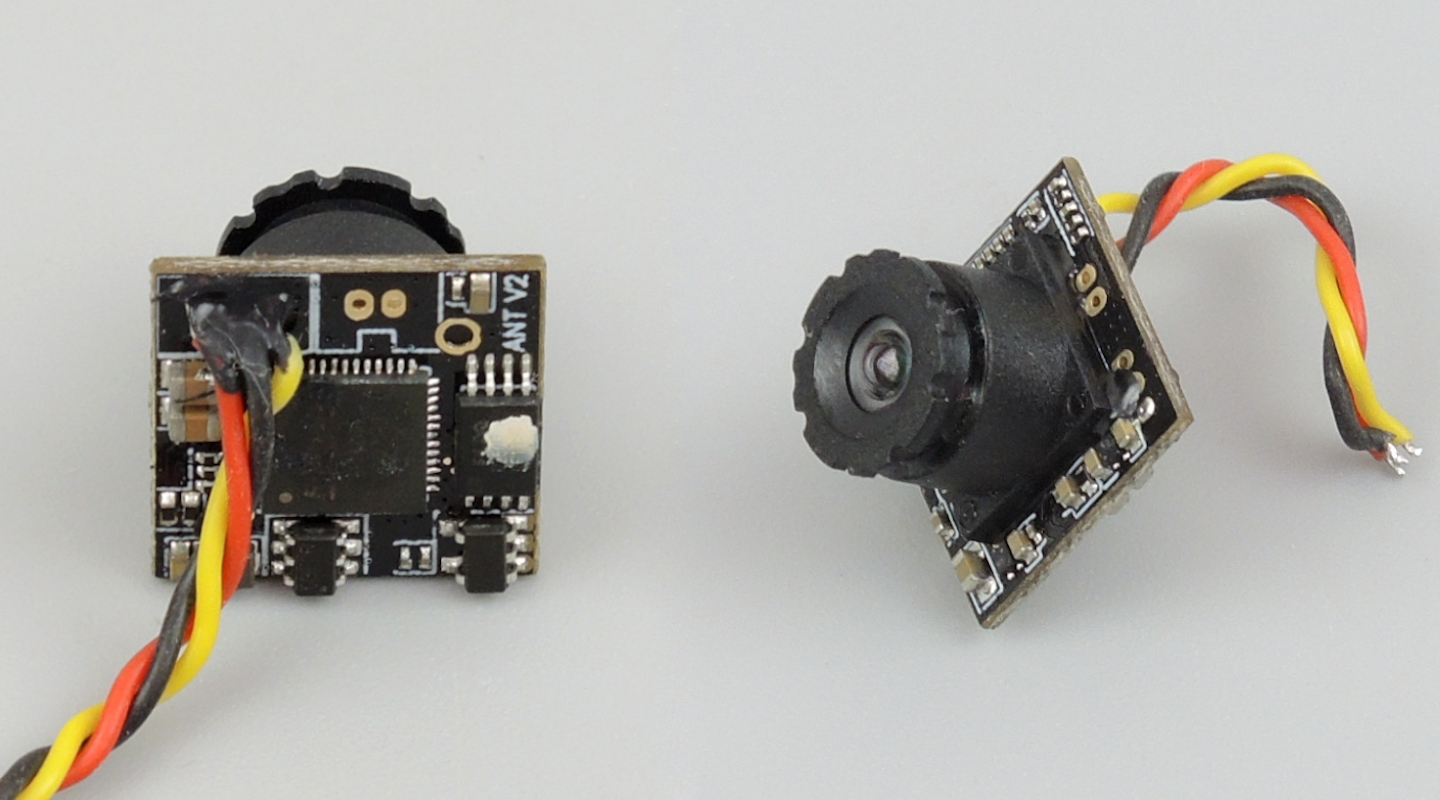
Камера Flywoo Nano Camera показалась до боли знакомой. Ага, это камера Caddx Ant Lite, только с пластиковым объективом. Я был очень разочарован, когда увидел камеру, так как с таким объективом выпускались камеры подразделениями BangGood и были они только с соотношением сторон изображения 16:9. Как и эта камера:(
Камера с выводами весит 1.48г. Если подпаять управляющий провод на какой-либо свободный UART-вывод полетного контроллера, то можно будет получить управление камерой, как это делал ранее.
Самая интересная часть - полетный контроллер. По большому счету, это то, ради чего брал на обзор Flywoo Firefly. Было интересно, можно ли использовать этот вариант для обычных тинивупов.
Оказалось, что очень даже можно, но... Его вес без антенн составляет 4.2г. Для примера, полетный контроллер от Mobula6 весит 4г, но он с разъемами для моторов. Полетник от Flywoo без разъемов, так что его лучше сравнивать с Happymodel DiamondF4, который весит 3.55г. И вот тут, увы, разница в весе получается значительная при практически том же функционале.
Полетник построен по уже сложившемуся рецепту для моделей такого класса: STM32F411-процессор, MPU6000-гироскопы, AT7456E-OSD, CC2500 в качестве приемника, EFM8BB21-чипы для управления SIA517DJ-T1-GE3-ключами. На плате установлены два RGB-светодиода, есть вывод для подключения внешних RGB-светодиодов. Можно подключить пищалку, внешний приемник по SBUS. Доступны выводы двух UART-портов, но один используется для управления встроенным видеопередатчиком. Доступна I2C-шина (SDA, SCL). Есть два дополнительных вывода B4 и B0, на них можно организовать Softserial или использовать для других функций. Приемник на SPI-шине может работать на всем доступном семействе протоколов, использующих CC2500-чип. Это FrSky_D8/FrSky_X/FrSky_X-LBT, Futaba S-FHSS, Redpine. Понравилось, что площадки для подключения моторов выведены с обоих сторон платы, это очень удобно. При подключении через USB к компьютеру, полетник практически не нагревается, так как встроенный видеопередатчик и светодиоды не получают питание.
Силовой PH2.0-разъем с не-цельными пинами. Срок жизни его сильно ограничен. Его вес с проводами 0.34г. Лучше сразу заменить его на BT2.0 или GNB27, так как квадрик будет потреблять более 5А и стоковый разъем будет узким горлышком. В новых версиях используется GNB27.
Сразу начну с блока регуляторов. Изначально внутри стояла прошивка BLHeli_M-16.80. Меняю ее на Bluejay-0.14 на 48кГц и выставляю привычные настройки. Тайминг не стал задирать на максимум. Стартовую мощность пришлось немного приподнять, ибо токи на моторах небольшие, а магниты туговаты - моторы не сразу стартовали.
В полетном контроллере в стоке была древняя прошивка BetaFlight-4.2.0. Основные функции были настроены, квадрик с этими настройками мог бы полететь, но, например, PID-ы стояли дефолтные. Сохранив дамп заводских настроек, хотел залить свежую версию BetaFlight и обломился. Таргета FLYWOOF411FR в прошивальщике конфигуратора нет:( Покопавшись на официальном сайте Flywoo, нашел только дефолтные настройки для полетного контроллера, аналогичные сохраненным. То есть, для обновления прошивки надо заливать таргет "STM32F411" и потом накатывать в настройках список ресурсов, DMA-каналов и таймеров из заводского конфига. Как-то через одно место получается... Ладно, попробую. Залил таргет STM32F411-4.2.11. Надо учитывать еще такой момент, что в настройках с официального сайта данные ресурсов по моторам выставлены так, как должен стоять полетный контроллер по умолчанию - USB-разъемом вниз. А в дампе настроек с квадрика уже выполнен ремаппинг моторов.
Данные PID-ов и фильтров для Flywoo Firefly позаимствовал из Project Mockingbird - подошли на отлично! Остальные параметры уже привычные для тинивупов. Получился такой дамп данных:
# diff all ###WARNING: NO CUSTOM DEFAULTS FOUND###
# version # Betaflight / STM32F411 (S411) 4.2.11 Nov 9 2021 / 20:28:23 (948ba6339) MSP API: 1.43 ###ERROR: diff: NO CONFIG FOUND### # start the command batch batch start
# reset configuration to default settings defaults nosave
# aux aux 0 0 0 1900 2100 0 0 aux 1 1 1 1900 2100 0 0 aux 2 2 2 1900 2100 0 0 aux 3 13 3 1900 2100 0 0 aux 4 15 5 900 1100 1 0 aux 5 15 0 900 1100 1 0 aux 6 28 6 1900 2100 0 0 aux 7 35 4 1900 2100 0 0
# adjrange adjrange 0 0 7 900 2100 12 7 0 0
# vtxtable vtxtable bands 5 vtxtable channels 8 vtxtable band 1 BOSCAM_A A CUSTOM 5865 5845 5825 5805 5785 5765 5745 5725 vtxtable band 2 BOSCAM_B B CUSTOM 5733 5752 5771 5790 5809 5828 5847 5866 vtxtable band 3 BOSCAM_E E CUSTOM 5705 5685 5665 5645 5885 5905 5925 5945 vtxtable band 4 FATSHARK F CUSTOM 5740 5760 5780 5800 5820 5840 5860 5880 vtxtable band 5 RACEBAND R CUSTOM 5658 5695 5732 5769 5806 5843 5880 5917 vtxtable powerlevels 5 vtxtable powervalues 25 100 200 400 600 vtxtable powerlabels 25 50 100 200 250
# master set gyro_lowpass2_hz = 350 set yaw_spin_recovery = ON set yaw_spin_threshold = 800 set dyn_notch_width_percent = 0 set dyn_notch_q = 150 set dyn_notch_max_hz = 400 set dyn_lpf_gyro_min_hz = 280 set dyn_lpf_gyro_max_hz = 700 set acc_calibration = 22,23,-74,1 set mag_hardware = NONE set baro_hardware = NONE set airmode_start_throttle_percent = 60 set rx_spi_protocol = REDPINE set rx_spi_bus = 3 set blackbox_device = NONE set dshot_idle_value = 900 set dshot_bidir = ON set motor_pwm_protocol = DSHOT300 set motor_poles = 12 set align_board_roll = 180 set vbat_max_cell_voltage = 460 set vbat_min_cell_voltage = 310 set vbat_warning_cell_voltage = 330 set current_meter = ADC set battery_meter = ADC set ibata_scale = 260 set beeper_inversion = ON set beeper_od = OFF set beeper_dshot_beacon_tone = 4 set yaw_motors_reversed = ON set small_angle = 180 set deadband = 2 set yaw_deadband = 2 set thrust_linear = 25 set osd_warn_rssi = ON set osd_warn_link_quality = ON set osd_tim1 = 1025 set osd_tim2 = 1792 set osd_vbat_pos = 2433 set osd_rssi_pos = 2105 set osd_tim_1_pos = 2455 set osd_throttle_pos = 2448 set osd_vtx_channel_pos = 2440 set osd_craft_name_pos = 2081 set osd_stat_tim_1 = ON set osd_stat_tim_2 = OFF set osd_stat_max_spd = OFF set osd_stat_battery = ON set osd_stat_bbox = OFF set osd_stat_bb_no = OFF set osd_stat_max_esc_rpm = ON set cpu_overclock = 120MHZ set vtx_band = 5 set vtx_channel = 3 set vtx_power = 4 set vtx_freq = 5732 set vcd_video_system = NTSC set max7456_spi_bus = 2 set gyro_1_spibus = 1 set gyro_1_sensor_align = CW0FLIP set gyro_1_align_pitch = 1800 set name = MCHeli
profile 0
# profile 0 set dyn_lpf_dterm_min_hz = 98 set dyn_lpf_dterm_max_hz = 238 set dterm_lowpass2_hz = 0 set vbat_sag_compensation = 100 set anti_gravity_gain = 2500 set crash_recovery_angle = 5 set crash_recovery = ON set iterm_relax_cutoff = 22 set iterm_limit = 500 set pidsum_limit = 1000 set pidsum_limit_yaw = 1000 set p_pitch = 120 set i_pitch = 117 set d_pitch = 109 set f_pitch = 161 set p_roll = 109 set i_roll = 111 set d_roll = 100 set f_roll = 152 set p_yaw = 117 set i_yaw = 117 set f_yaw = 152 set angle_level_strength = 90 set d_min_roll = 0 set d_min_pitch = 0 set d_min_boost_gain = 30 set d_min_advance = 0 set level_race_mode = ON
profile 1
profile 2
# profile 2 set vbat_sag_compensation = 100 set anti_gravity_gain = 2500 set crash_recovery_angle = 5 set crash_recovery = ON set iterm_limit = 500 set pidsum_limit = 1000 set pidsum_limit_yaw = 1000 set p_pitch = 85 set i_pitch = 25 set d_pitch = 90 set f_pitch = 250 set p_roll = 85 set i_roll = 25 set d_roll = 90 set f_roll = 250 set p_yaw = 120 set f_yaw = 0 set d_min_roll = 80 set d_min_pitch = 80 set d_min_boost_gain = 30 set d_min_advance = 0
# restore original profile selection profile 0
rateprofile 0
# rateprofile 0 set thr_expo = 50 set rates_type = ACTUAL set roll_rc_rate = 18 set pitch_rc_rate = 18 set yaw_rc_rate = 16 set roll_expo = 50 set pitch_expo = 50 set yaw_expo = 40 set roll_srate = 54 set pitch_srate = 54 set yaw_srate = 60 set tpa_breakpoint = 1750
rateprofile 1
rateprofile 2
# rateprofile 2 set thr_expo = 50 set rates_type = ACTUAL set roll_rc_rate = 18 set pitch_rc_rate = 18 set yaw_rc_rate = 16 set roll_expo = 80 set pitch_expo = 80 set yaw_expo = 40 set roll_srate = 86 set pitch_srate = 86 set yaw_srate = 60 set tpa_breakpoint = 1750
# restore original rateprofile selection rateprofile 0
# save configuration save #
Для управления использовал Redpine-протокол. Каких-либо проблем по дальности не обнаружил. Впрочем, есть свободный UART и туда никто не мешает повесить маленький ExpressLRS-приемник.
По итогу, Flywoo Firefly вполне достойный дворолет! Уверенно держит ветер до 5-7м/c, хорошо управляется, предсказуемо летит, неожиданно легкий на подхват. Если к каждой из деталей у меня были какие-либо претензии, то в совокупности все оно работает как надо. Новые пропики Gemfan на 40мм зашли на отлично и оправдали ожидания! С ними ток не поднимался выше 7А и это прекрасно. Моторки вполне тяговитые, но, как и ожидал, не очень быстрые. Если на улице можно летать и не беспокоиться об этом, то полет в помещении - тот еще экстрим. Единственный крайне негативный момент - это камера. Летать в очках 4:3 с камерой 16:9 - малоприятное удовольствие. Да еще и вертикальный угол обзора у камеры крайне маловат. На улице не чувствуется, а в помещении совсем не видно, куда лететь. Было ощущение, что картинка подрезана сверху и снизу, чтобы получить формат 16:9. Использовал тинивупные аккумуляторы на 300мА/ч, их хватает примерно на две с половиной минуты активного полета. Для этой модели однозначно потребуются аккумуляторы на 450мА/ч.
Пожалуй, это все, что я хотел бы рассказать о Flywoo Firefly. Удачных полетов!