
Модель не для новичков, хотя и имеет 6G-режим. Вертолет с весом более ста грамм - уже не игрушка, падать на таком аппарате категорически не рекомендуется!
Технические характеристики XK K130:
- Диаметр основного ротора: 332мм
- Диаметр хвостового ротора: 45мм
- Длина: 305мм
- Высота: 98мм
- Взлетный вес: 130г
- Вес без аккумулятора: 99.5г
- Аккумулятор: 600мА/ч 2S 25C
- Основной двигатель: бесколлекторный 1308 на 9200kV
- Хвостовой двигатель: 1020
- Протокол управления: Futaba S-FHSS
- Возможность подключения внешнего SBUS-приемника или DSM-сателлита
- Имеется 6G-режим
RTF-комплект приехал в большой плотной коробке. Ехало оно долго, коробка оказалась значительно повреждена. Но, как и у других моделей от XK Innovations, внутри основной коробки оказались еще три небольшие: с вертолетом, пультом и аксессуарами.

Более того, сам вертолет дополнительно упакован в пластиковые корки, так что все приехало без повреждений.

В комплекте был классический пульт XK X6, инструкция для передатчика и вертолета, простейшее зарядное устройство, отвертка, маленький шестигранник, запасные лопасти, основная шестерня, линки, демпферы на канопу, хвостовой винт и аккумулятор.

Первое впечатление от XK K130 - довольно массивный, как бы цельный такой, выглядит на отлично. Расположение сервоприводов, как у Align T-Rex 150.

Голова основного ротора вся в металле. Канопа фиксируется в четырех точках. Хвостовая балка карбоновая.

В комплекте был всего один аккумулятор на 2S/600мА/ч на 25C с разъемом XT30. Не очень мощный, весом 30.5 грамм.

Покупать несколько аккумуляторов я не планировал, буду использовать сборку из двух однобаночных аккумуляторов через самодельный переходник PH2.0-XT30.

Вес такой конструкции 27.7 грамма, немного меньше стокового аккумулятора. Блок без проблем входит в батарейный отсек. В продаже есть и апгрейдный аккумулятор на 2S/750мА/ч на 35C.

Стоковое зарядное устройство очень примитивное, крайне не рекомендую им пользоваться. Лучше иметь нормальное зарядное устройство.
Разбор конструкции начну с хвоста. На карбоновой балке диаметром 6мм установлен коллекторный мотор диаметром 10мм, длиной 20мм, с валом на 1.2мм. Весит мотор 7.4 грамма - солидная гирька!

На валу установлен пропеллер диаметром 45мм. Мотор подключается к одножильным проводам диаметром 0.6мм, проложенным внутри балки, через разъем, который спрятан под крышечкой.

Хвостовой костыль надет поверх балки и фиксируется болтиком к держателю хвостового мотора. Хвостовая балка вставляется в раму и фиксируется в раме болтиком.

Рама сделана из жесткого и прочного карбонизированного пластика. Рама состоит всего из двух частей: основания и верхней планки фиксации сервоприводов с антивращателем тарелки автомата перекоса. Шасси выполнены из чуть более мягкого пластика, но очень прочные.

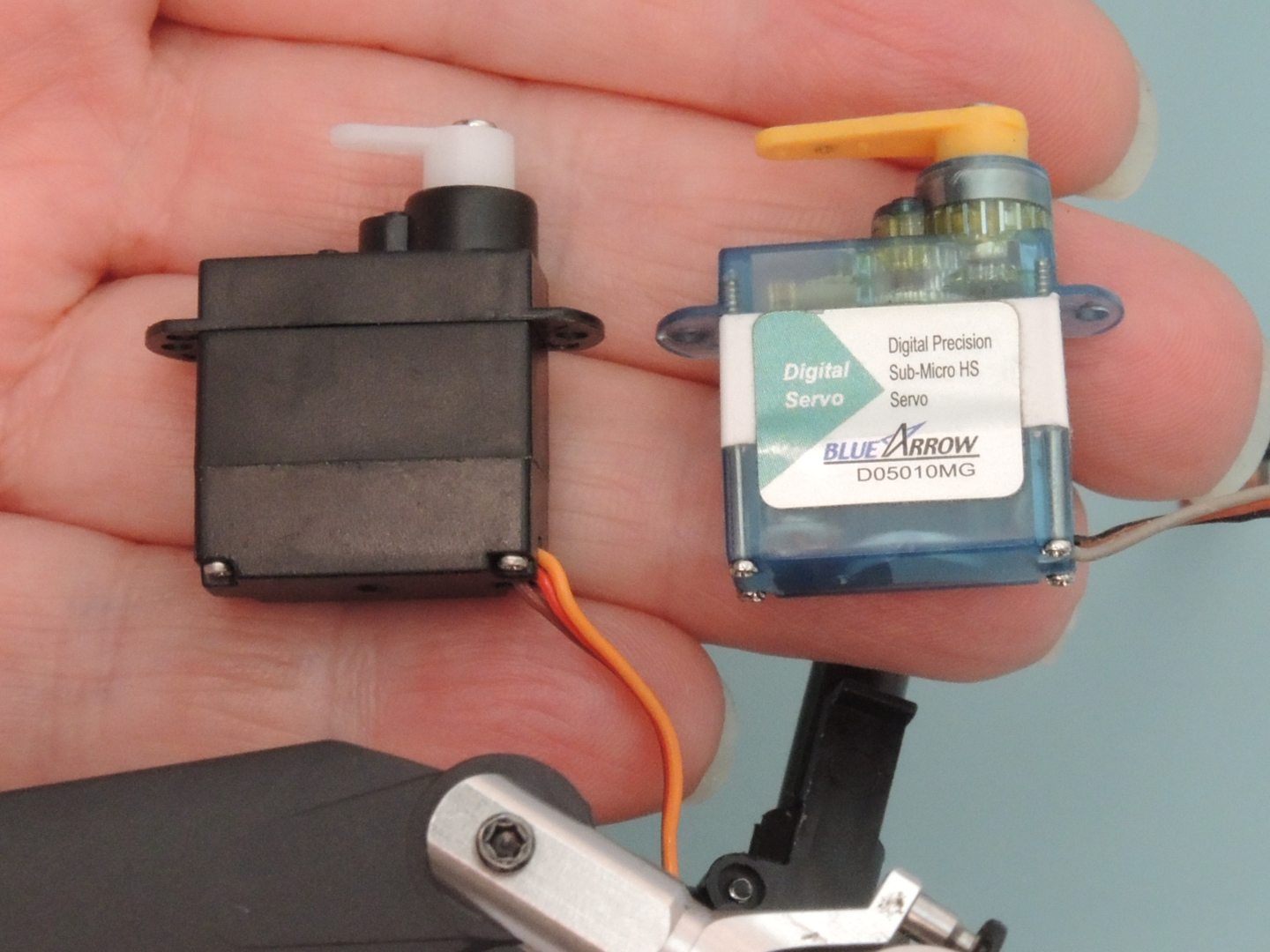
Блок сервоприводов собран на основе стандартных микросерв 20x8.5мм. Характеристики их неизвестны, кроме одной - центральное положение сервы задается шириной PPM-сигнала на 1520мс. Передние сервы поджимаются сверху планкой с антивращателем тарелки автомата перекоса.

Если сломаются стоковые сервы, можно всегда заменить на более качественные с металлическим редуктором. Сервы питаются от 5В.

В передней части рамы прикручен тремя винтиками полетный контроллер. Хотя между ним и рамой есть резиновые демпферы, но полной виброразвязки нет. Под ним стоит регулятор основного мотора, который ничем не закреплен, просто поджат к элементам рамы.

За электроникой по центру рамы стоит основной мотор размера 1308 на 9200kV. Мотор должен быть достаточно мощный для такой модели.
Голова основного ротора особенно интересна. По конструкции похожа на ту, что используется у меня на GAUI X3 и ALZRC X360. Почти все детали головы выполнены из металла. Конструкция такова, что люфт деталей минимален, ничего нигде не заедает.

Сразу же разобрал голову, хотел проверить, есть ли в цапфах упорные подшипники. Оказалось, что нет:) Стоят по два обычных однорядных подшипника 2x5x2мм. Межлопастный вал диаметром 2мм, длиной 31.1мм. Демпферы не резиновые, а из эластичного пластика.

Пластиковые рычаги крепятся к голове основного ротора через латунные вставки. Диаметр всех шариков на тарелке и цапфах 2.35мм. Основной вал не смог вытащить из головы. Диаметр основного вала 3мм. Внутри тарелки автомата перекоса стоит латунный шарик. Все резьбовые соединения были собраны с локтайтом.
Холдер под аккумуляторы очень большой, можно поэкспериментировать с различными аккумуляторами, даже на три банки, если заменить регулятор основного мотора:)

Основная шестерня с модулем 0.4 на 73 зуба под вал 3мм, довольно маленькая, посажена на шлиц и зафиксирована на валу болтиком. Латунный пиньен на 9 зубьев под вал 1.5мм.

Основную шестерню лучше сразу провернуть на валу и зафиксировать вместо болтика либо куском мягкой проволоки, либо зубочисткой. При краше такой шплинт срежет. Это позволит сохранить шестерню и элементы головы основного ротора от значительных повреждений.

Основные лопасти по факту оказались длиной 142мм, если считать от центра отверстия.

Канопа достаточно жесткая, может и переживет несколько аварий:) Не понравилось крепление канопы в четырех точках. Мало того, что насаживать ее непросто, так еще из-за небольших отверстий резиночки так и норовят выскочить из канопы!
Разобрал блок электроники. Регулятор основного мотора построен на процессоре STM32F051K6, который управляет силовыми ключами через драйвер Fortior FD6288T. На борту имеется стабилизатор напряжения на 5В, построенный на микросхеме XL1530E1, выдерживающей ток до 3А.

С регулятора есть два вывода: подача основного напряжения на транзистор управления хвостовым мотором и разъем с управляющим PPM-входом и выходом напряжения 5В для питания полетного контроллера и серв.
Полетный контроллер сделан на основе процессора STM32F031K6. В качестве приемника выступает примитивный модуль CC2500 на SPI-шине. Под красной крышкой на плате стоит гироскоп ICM-20608. Гироскоп приклеен к кусочку текстолита, который приклеен к металлической пластинке, которая приклеена к мягкому демпферу:) Хвостовым мотором управляем мощный транзистор MDS1521, выдерживающий напряжение до 30В и ток до 28А.

Изначально вертолет управляется по протоколу Futaba S-FHSS, как и другие модели от XK Innovations. Справа на нижней стороне платы есть кнопочка сопряжения приемника с передатчиком. Если ее нажать и подержать при включенной модели, то полетный контроллер переведет CC2500-модуль в режим сопряжения. Но моделью можно управлять с любого пульта, если подключить внешний SBUS-приемник или DSM-сателлит. Специальное гнездо слева от гироскопа как раз для этого и предназначено.

Позже попробую подключить приемник FrSky XM, а пока буду использовать мультимодуль в пульте.
Остался передатчик XK X6. Очень подробно рассказывал о нем раньше. С тех пор ничего не изменилось. Это неплохой пульт начального уровня, с памятью на 10 моделей, с настраиваемыми расходами, экспонентами, кривыми шага и газа. Работает только по протоколу Futaba S-FHSS.

Питается пульт от шести AA-элементов. К передатчику можно подключить симулятор через тренерский разъем. Есть возможность настраивать жесткость стиков, не разбирая пульт.

Рекомендованные настройки кривых шага и газа для XK X6 есть в инструкции вертолета.
Теперь настройка. Как и говорил выше, буду использовать передатчик FrSky QX7 с мультимодулем iRangeX IRX4. Порядок каналов, как и у прочих моделей от XK Innovations:
В настройках пульта отключил встроенный модуль, в качестве внешнего выбрал мультимодуль и на нем включил протокол S-FHSS.

В микшерах все сделал примитивно. Повесил на тумблер расходы 70/100% на первые два канала, на канал газа сделал 4 режима: нормальный режим со срезанной полкой на 70% газа, Idle1 с полной полкой на 70% газа, Idle2 с полкой на 100% газа, и холд с газом в нуле. На пятый канал повесил отдельный тумблер, хотя им и не пользуюсь. На шестом канале задал чуть поджатую снизу кривую для нормального режима и без всякой кривой для Idle-режимов. По шестому каналу пришлось поджимать значения до 32%, чтобы максимальный шаг был адекватным, в районе +12/-12 градусов.

На выходе сделал на всех каналах диапазон 1000-2000мс. Первый и четвертый пришлось инвертировать. Пятый тоже инвертировал, но лишь для того, чтобы 3D-режим был включен постоянно.

Сначала приподнял вертолет в комнате, проверил работу механики. Перед этим выставил тарелку в горизонт, поймал нулевой шаг.
На улице был небольшой порывистый ветер, но модель его не замечала. Удалось отлетать только три аккумулятора. После первого же аккумулятора начались проблемы с хвостом.
Думаю, что хвосту просто не хватало питания. Чувствовалось, что гироскоп отрабатывает нормально. Снял хвостовую балку и увидел следующее.

К толстым одножильным проводам внутри балки припаяны тоненькие проводки на разъеме, да еще и один надломлен. Думаю, что здесь и была причина в плохой работе хвоста.
После аварии почти ничего не пострадало. Только немного отбилась краска на канопе и появились царапины на кончиках лопастей.
Итак, у XK K130 есть хороший потенциал! Модель, конечно, не для новичков, падать на ней категорически не рекомендую, только если в мягкую траву:) Хотелось бы побольше оборотов на основном роторе. Это можно сделать, если заменить мотор и поставить пиньен на 10 зубьев. Возможность подключить внешний приемник - отличное дополнение! Сервы стандартного размера - еще один плюс. Голова основного ротора очень удачной конструкции, но без упорных подшипников в цапфах. Жаль, что хвост не бесколлекторный - это минус. Габариты вертолета XK K130 вполне удобные. Это уже не модель для полетов в помещении, но еще и не на столько большой аппарат, чтобы выходить в поле. Небольшой ветер для него не помеха. Вес модели вполне соответствует ее размеру. Можно даже немного стречнуть при желании:) Да и на три банки перевести не проблема, если заменить регулятор. Даже коллекторный хвостовой мотор должен вынести такое "издевательство".
Чуть не забыл отметить момент с посадкой вертолета. Сажусь с холдом, то есть, в момент посадки отключаю основной двигатель. И вот тут вылезла одна проблема - хвостовой двигатель тоже отключается и останавливается мгновенно. Из-за этого модель по инерции заваливается на бок. Приходится в момент посадки активно так крутить стики, чтобы вертолет не завалился и не побил лопасти.
На этом пока все. Позже доведу хвост до ума и сделаю еще несколько видео с полетами. Пока так и не удалось прощупать модель в полной мере.

Первое впечатление от XK K130 - довольно массивный, как бы цельный такой, выглядит на отлично. Расположение сервоприводов, как у Align T-Rex 150.

Голова основного ротора вся в металле. Канопа фиксируется в четырех точках. Хвостовая балка карбоновая.

В комплекте был всего один аккумулятор на 2S/600мА/ч на 25C с разъемом XT30. Не очень мощный, весом 30.5 грамм.

Покупать несколько аккумуляторов я не планировал, буду использовать сборку из двух однобаночных аккумуляторов через самодельный переходник PH2.0-XT30.

Вес такой конструкции 27.7 грамма, немного меньше стокового аккумулятора. Блок без проблем входит в батарейный отсек. В продаже есть и апгрейдный аккумулятор на 2S/750мА/ч на 35C.

Стоковое зарядное устройство очень примитивное, крайне не рекомендую им пользоваться. Лучше иметь нормальное зарядное устройство.
Разбор конструкции начну с хвоста. На карбоновой балке диаметром 6мм установлен коллекторный мотор диаметром 10мм, длиной 20мм, с валом на 1.2мм. Весит мотор 7.4 грамма - солидная гирька!

На валу установлен пропеллер диаметром 45мм. Мотор подключается к одножильным проводам диаметром 0.6мм, проложенным внутри балки, через разъем, который спрятан под крышечкой.

Хвостовой костыль надет поверх балки и фиксируется болтиком к держателю хвостового мотора. Хвостовая балка вставляется в раму и фиксируется в раме болтиком.

Рама сделана из жесткого и прочного карбонизированного пластика. Рама состоит всего из двух частей: основания и верхней планки фиксации сервоприводов с антивращателем тарелки автомата перекоса. Шасси выполнены из чуть более мягкого пластика, но очень прочные.

Блок сервоприводов собран на основе стандартных микросерв 20x8.5мм. Характеристики их неизвестны, кроме одной - центральное положение сервы задается шириной PPM-сигнала на 1520мс. Передние сервы поджимаются сверху планкой с антивращателем тарелки автомата перекоса.

Если сломаются стоковые сервы, можно всегда заменить на более качественные с металлическим редуктором. Сервы питаются от 5В.
В передней части рамы прикручен тремя винтиками полетный контроллер. Хотя между ним и рамой есть резиновые демпферы, но полной виброразвязки нет. Под ним стоит регулятор основного мотора, который ничем не закреплен, просто поджат к элементам рамы.

За электроникой по центру рамы стоит основной мотор размера 1308 на 9200kV. Мотор должен быть достаточно мощный для такой модели.
Голова основного ротора особенно интересна. По конструкции похожа на ту, что используется у меня на GAUI X3 и ALZRC X360. Почти все детали головы выполнены из металла. Конструкция такова, что люфт деталей минимален, ничего нигде не заедает.

Сразу же разобрал голову, хотел проверить, есть ли в цапфах упорные подшипники. Оказалось, что нет:) Стоят по два обычных однорядных подшипника 2x5x2мм. Межлопастный вал диаметром 2мм, длиной 31.1мм. Демпферы не резиновые, а из эластичного пластика.

Пластиковые рычаги крепятся к голове основного ротора через латунные вставки. Диаметр всех шариков на тарелке и цапфах 2.35мм. Основной вал не смог вытащить из головы. Диаметр основного вала 3мм. Внутри тарелки автомата перекоса стоит латунный шарик. Все резьбовые соединения были собраны с локтайтом.
Холдер под аккумуляторы очень большой, можно поэкспериментировать с различными аккумуляторами, даже на три банки, если заменить регулятор основного мотора:)

Основная шестерня с модулем 0.4 на 73 зуба под вал 3мм, довольно маленькая, посажена на шлиц и зафиксирована на валу болтиком. Латунный пиньен на 9 зубьев под вал 1.5мм.

Основную шестерню лучше сразу провернуть на валу и зафиксировать вместо болтика либо куском мягкой проволоки, либо зубочисткой. При краше такой шплинт срежет. Это позволит сохранить шестерню и элементы головы основного ротора от значительных повреждений.

Основные лопасти по факту оказались длиной 142мм, если считать от центра отверстия.

Канопа достаточно жесткая, может и переживет несколько аварий:) Не понравилось крепление канопы в четырех точках. Мало того, что насаживать ее непросто, так еще из-за небольших отверстий резиночки так и норовят выскочить из канопы!
Разобрал блок электроники. Регулятор основного мотора построен на процессоре STM32F051K6, который управляет силовыми ключами через драйвер Fortior FD6288T. На борту имеется стабилизатор напряжения на 5В, построенный на микросхеме XL1530E1, выдерживающей ток до 3А.

С регулятора есть два вывода: подача основного напряжения на транзистор управления хвостовым мотором и разъем с управляющим PPM-входом и выходом напряжения 5В для питания полетного контроллера и серв.
Полетный контроллер сделан на основе процессора STM32F031K6. В качестве приемника выступает примитивный модуль CC2500 на SPI-шине. Под красной крышкой на плате стоит гироскоп ICM-20608. Гироскоп приклеен к кусочку текстолита, который приклеен к металлической пластинке, которая приклеена к мягкому демпферу:) Хвостовым мотором управляем мощный транзистор MDS1521, выдерживающий напряжение до 30В и ток до 28А.

Изначально вертолет управляется по протоколу Futaba S-FHSS, как и другие модели от XK Innovations. Справа на нижней стороне платы есть кнопочка сопряжения приемника с передатчиком. Если ее нажать и подержать при включенной модели, то полетный контроллер переведет CC2500-модуль в режим сопряжения. Но моделью можно управлять с любого пульта, если подключить внешний SBUS-приемник или DSM-сателлит. Специальное гнездо слева от гироскопа как раз для этого и предназначено.
Позже попробую подключить приемник FrSky XM, а пока буду использовать мультимодуль в пульте.
Остался передатчик XK X6. Очень подробно рассказывал о нем раньше. С тех пор ничего не изменилось. Это неплохой пульт начального уровня, с памятью на 10 моделей, с настраиваемыми расходами, экспонентами, кривыми шага и газа. Работает только по протоколу Futaba S-FHSS.

Питается пульт от шести AA-элементов. К передатчику можно подключить симулятор через тренерский разъем. Есть возможность настраивать жесткость стиков, не разбирая пульт.

Рекомендованные настройки кривых шага и газа для XK X6 есть в инструкции вертолета.
Теперь настройка. Как и говорил выше, буду использовать передатчик FrSky QX7 с мультимодулем iRangeX IRX4. Порядок каналов, как и у прочих моделей от XK Innovations:
- Элероны
- Элеватор
- Газ
- Руддер
- Режим гироскопа
- Шаг
В настройках пульта отключил встроенный модуль, в качестве внешнего выбрал мультимодуль и на нем включил протокол S-FHSS.

В микшерах все сделал примитивно. Повесил на тумблер расходы 70/100% на первые два канала, на канал газа сделал 4 режима: нормальный режим со срезанной полкой на 70% газа, Idle1 с полной полкой на 70% газа, Idle2 с полкой на 100% газа, и холд с газом в нуле. На пятый канал повесил отдельный тумблер, хотя им и не пользуюсь. На шестом канале задал чуть поджатую снизу кривую для нормального режима и без всякой кривой для Idle-режимов. По шестому каналу пришлось поджимать значения до 32%, чтобы максимальный шаг был адекватным, в районе +12/-12 градусов.

На выходе сделал на всех каналах диапазон 1000-2000мс. Первый и четвертый пришлось инвертировать. Пятый тоже инвертировал, но лишь для того, чтобы 3D-режим был включен постоянно.

Сначала приподнял вертолет в комнате, проверил работу механики. Перед этим выставил тарелку в горизонт, поймал нулевой шаг.
На улице был небольшой порывистый ветер, но модель его не замечала. Удалось отлетать только три аккумулятора. После первого же аккумулятора начались проблемы с хвостом.
Думаю, что хвосту просто не хватало питания. Чувствовалось, что гироскоп отрабатывает нормально. Снял хвостовую балку и увидел следующее.

К толстым одножильным проводам внутри балки припаяны тоненькие проводки на разъеме, да еще и один надломлен. Думаю, что здесь и была причина в плохой работе хвоста.
После аварии почти ничего не пострадало. Только немного отбилась краска на канопе и появились царапины на кончиках лопастей.
Итак, у XK K130 есть хороший потенциал! Модель, конечно, не для новичков, падать на ней категорически не рекомендую, только если в мягкую траву:) Хотелось бы побольше оборотов на основном роторе. Это можно сделать, если заменить мотор и поставить пиньен на 10 зубьев. Возможность подключить внешний приемник - отличное дополнение! Сервы стандартного размера - еще один плюс. Голова основного ротора очень удачной конструкции, но без упорных подшипников в цапфах. Жаль, что хвост не бесколлекторный - это минус. Габариты вертолета XK K130 вполне удобные. Это уже не модель для полетов в помещении, но еще и не на столько большой аппарат, чтобы выходить в поле. Небольшой ветер для него не помеха. Вес модели вполне соответствует ее размеру. Можно даже немного стречнуть при желании:) Да и на три банки перевести не проблема, если заменить регулятор. Даже коллекторный хвостовой мотор должен вынести такое "издевательство".
Чуть не забыл отметить момент с посадкой вертолета. Сажусь с холдом, то есть, в момент посадки отключаю основной двигатель. И вот тут вылезла одна проблема - хвостовой двигатель тоже отключается и останавливается мгновенно. Из-за этого модель по инерции заваливается на бок. Приходится в момент посадки активно так крутить стики, чтобы вертолет не завалился и не побил лопасти.
На этом пока все. Позже доведу хвост до ума и сделаю еще несколько видео с полетами. Пока так и не удалось прощупать модель в полной мере.