
Первым делом решил разобраться с прошивкой PDB RealAcc HUBOSD. Делал все по инструкции с сайта stosd.com. Скачал программу для прошивки STOSD8_Tool. Как сказано в инструкции, подключил три проводка к FTDI-адаптеру, дал питание на плату PDB и запустил программу. В самой программе ничего сложного. Проверил обновление, соединился с платой, залил последнюю прошивку версии 3.3 и все. Настроек самый минимум. Разве что откалибровал показания напряжения.
Припаял силовой разъем XT60 к плате PDB RealAcc HUBOSD. Потребовался мощный 40-ваттный паяльник. Снизу к раме, в месте установки аккумулятора, наклеил липучку длиной 80мм. Сразу же просунул в раму ремешок для фиксации аккумулятора. Кстати, ремешок из комплекта длиной 20 сантиметров коротковат для фиксации четырех-баночного аккумулятора. Заменил его на прорезиненный ремешок от BangGood длиной 22см.

Установил плату PDB RealAcc HUBOSD на короткие пластиковые стоечки, которые были с ней в комплекте. Пластиковые винтики из комплекта платы PDB не подошли - коротковаты. Пришлось искать винтики M3x8.

К плате PDB на шину питания сразу же установил конденсатор 1000мкФ/25В. Можно было и на 820мкФ установить. Как показала практика, такие конденсаторы отлично помогают от неожиданного пропадания видео в полете из-за неустойчивой работы OSD, да и просто от помех на видео.
Перед установкой моторов RacerStar BR2205 2300kV на раму, заклеил у них скотчем нижнюю часть. Если произойдет авария и из мотора вырвет ротор, что уже случалось, то стопорное кольцо не потеряется. Можно будет прямо в поле быстро снять и восстановить мотор.

Подготовил регуляторы RacerStar RS30A V2 для установки. Сначала снял с них термоусадку, чтобы потом покрыть лаком "Пластик 71" для защиты от влаги.

Силовые провода укоротил до 40мм, кончики зачистил и залудил. Так же залудил площадки для проводов от моторов. Уже когда сделал снимок, то заметил, что на нижнем регуляторе сигнальный провод спаян с общим! Хорошо, что заметил - исправил.

Решил сразу же подготовить регуляторы для работы с новым цифровым протоколом DSHOT-600. Как написано в документации, для этого необходимо удалить фильтрующий конденсатор. Оно хоть и не очень нужно, на DSHOT-300 будет и с ним работать, но уж раз есть возможность сделать по максимуму, пусть будет по максимуму.
Установил моторы RacerStar BR2205-2300kV на раму с учетом направления вращения. Передний левый и задний правый - по часовой стрелке, передний правый и задний левый - против часовой. Для защиты моторов поставил KingKong Motor Cover. Моторы закрепил винтиками M3x8 из комплекта защиты.

Провода моторов обрезал до 20-21мм, средний покороче, боковые подлиннее. Выводы зачистил и залудил.
Припаял регуляторы к моторам. Причем на моторах с вращением против часовой стрелки два проводка сделал крест-накрест, чтобы не менять направление вращения моторов в настройках регуляторов. Очистил спиртом остатки канифоли и покрыл регуляторы с обоих сторон лаком "Пластик 71". Когда лак высох, регуляторы снова упаковал в термоусадку. Под регуляторы подклеил полоски толстого двухстороннего скотча для фиксации на лучах. Позже еще и изолентой примотаю.

Припаял силовые провода от регуляторов к плате распределения питания. Пришлось использовать мощный паяльник на 40 ватт, иначе не получалось прогреть место пайки. Как-то не правильно на плате пятачки для силовых проводов расположены - местами перепутаны:) Пришлось бы либо регуляторы силовыми ключами к раме разворачивать, либо провода крест-накрест делать. Я выбрал второе, хотя оно и менее эстетично.
Решил собрать верхнюю часть рамы и установить передатчик. Но перед этим немного модифицировал передатчик Eachine ET526 - заменил разъем с SMA на RP-SMA, так как у меня все антенны именно под RP-SMA. Для этого вместе с передатчиком был приобретен отдельный RP-SMA разъем, из него извлечен центральный пин и установлен в разъем передатчика.

Раз уж снял с передатчика термоусадку, думал покрыть передатчик лаком "Пластик 71" или нет. Решил не покрывать. На нем еще и микрофон установлен, боюсь лак в него затечет. Просто снова упаковал передатчик в термоусадку.
Когда собрал верхнюю часть рамы из комплекта для друга, то обнаружил, что одна карбоновая деталь явно коротковата.
Площадка для экшен-камеры на одной раме едва держится в пазах, а на другой раме стоит нормально. Хорошо, что эти площадки есть отдельно в продаже - позже заменю. На передатчик Eachine ET526 со стороны радиатора приклеил толстый двухсторонний скотч и притянул к раме стяжками.
Встал он немного не ровно, но вполне надежно. Когда будет установлена антенна, ее тоже нужно стяжкой притянуть к раме, чтобы не вырвало разъем из передатчика при авариях.
Подготовил две камеры Foxeer HS1177 черного и оранжевого цвета. Разобрал и проклеил контакты матрицы термоклеем, так как часто читал, что во время аварий матрицу может оторвать от платы. Надеюсь, термоклей поможет удержать ее на месте.
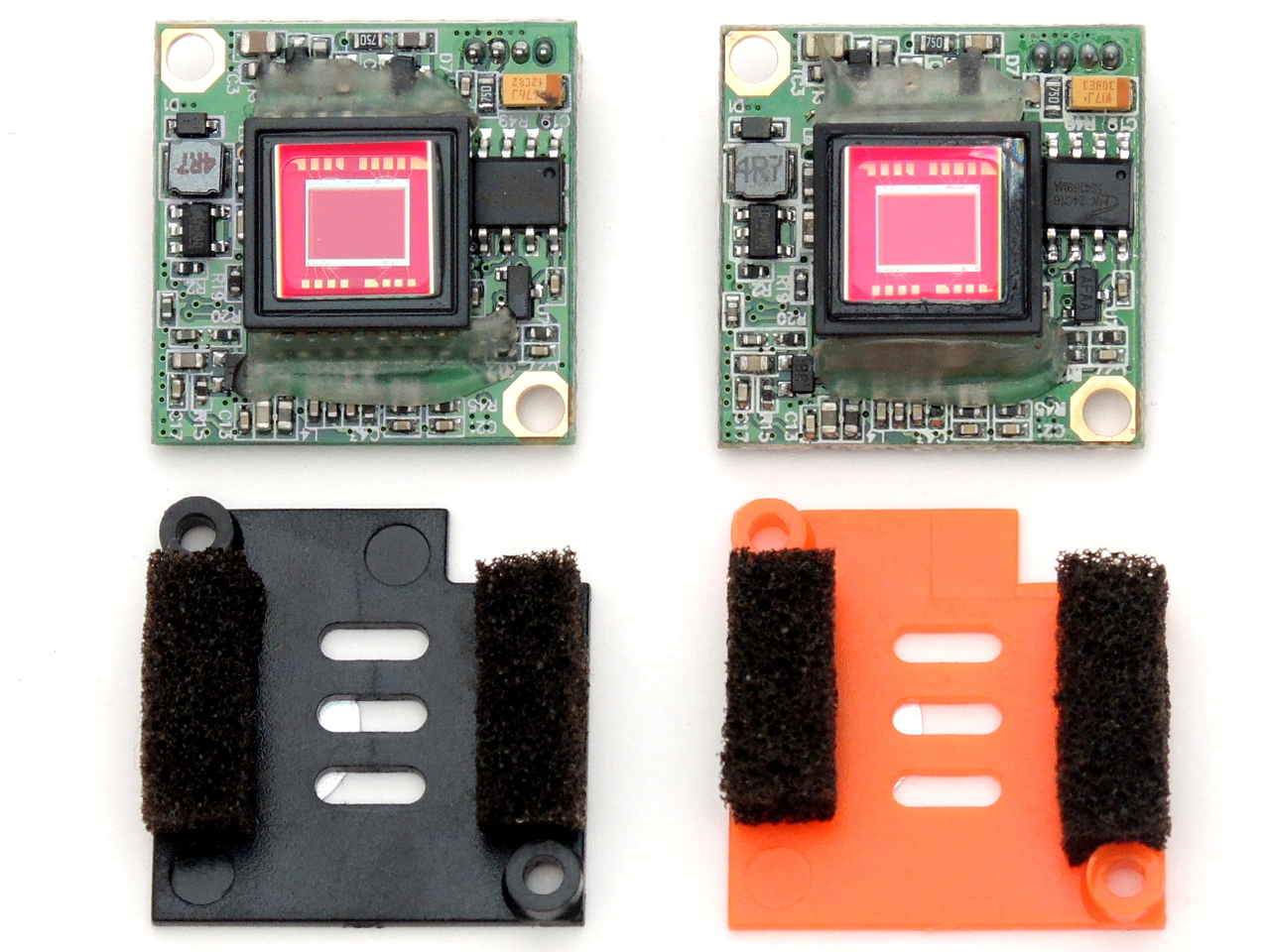
В сети подсмотрел, что на крышки камер приклеивают кусочки поролона, чтобы плата камеры не вибрировала. Подключил камеры к компьютеру через ТВ-тюнер, а для питания использовал аккумулятор от шлема. Заменил стоковые линзы на линзы типа от GoPro2 и настроил резкость.

Картинка с новыми линзами стала немного шире, но не настолько, чтобы было не комфортно летать. Специально сначала заменил линзу на одной камере и попеременно подключал камеры, чтобы оценить разницу. Резкости и параметры настраивал по этому видео.
Вроде бы уже все подготовлено для полной сборки, но тут вспомнил, что нужно еще и крепление для панельки светодиодов придумать. Быстренько нарисовал в Inkscape подходящий эскиз, распечатал, прилепил на заготовку, вырезал дремелем и довел надфилями. В качестве заготовки использовал заглушку CD-привода от старого компьютерного корпуса.

Крепление светодиодов держится за стойки, а снизу еще немного цепляется и за лучи, так что никуда не сдвинется. Светодиоды подключил на разъеме прямо в порт полетного контроллера SP Racing F3 6DOF. Кстати, сам полетный контроллер пришлось установить вверх ногами из-за того, что в него спереди упиралась камера своим разъемом. Да и выводы получились удачно и в нужном месте. В вырез крепления светодиодов установил на толстый двухсторонний скотч еще и пищалку - ей тут самое место. Стойки снизу закреплены винтиками M3x8.
Прежде чем установить полетный контроллер, вывел все необходимые провода с платы PDB. Полетный контроллер будет питаться от напряжения 5 вольт, вывел провода для этого рядом с силовым разъемом. Рядом с конденсатором сделал отдельный вывод для контроля напряжения аккумулятора, который позже пойдет в разъем VBAT полетного контроллера.

Передатчик будет питаться от напряжения 12 вольт, а камера - от 5 вольт. Так как каналами передатчика можно управлять программно, оставил для этого отдельный провод. После монтажа покрыл плату PDB лаком "Пластик 71" для защиты от влаги. Все, с разводкой видеосигнала и питания компонентов закончено.
На полетных контроллерах залил термоклеем USB-разъем, так как бывали случаи его отрыва во время аварии. На самом деле, просто перестраховался.

В выходам UART3 подпаял разъем приемника, а к контактам VBAT - разъем для передачи напряжения аккумулятора на приемник. Приемник OrangeRX R602X имеет телеметрию и может передавать напряжение аккумулятора на передатчик. Осталось покрыть полетные контроллеры лаком "Пластик 71".
Когда стал примерять всю связку PDB - полетный контроллер - приемник, то понял, что верхнюю часть рамы будет сложно установить. Передатчик упирался в приемник и по высоте не хватало примерно миллиметра. Пришлось снова все разбирать и укорачивать на тот самый миллиметр нижние стоки под PDB. А вместе с ними и болтики. Только тогда удалось все собрать.

К полетному контроллеру подпаял пищалку и сигнальные провода от регуляторов. Управляющий провод от передатчика подпаял к седьмому выходу полетного контроллера. Позже настрою переключение каналов передатчика прямо с пульта.

Приемник установил сверху на толстый двухсторонний скотч. Очень хотел зафиксировать его еще и стяжкой, но монтаж между полетным контроллером и платой PDB такой плотный, что там просто не протиснуться. Наружу остались торчать только два разъема: для камеры и передатчика.
Оставалось только установить верхнюю часть рамы и воткнуть разъемы в камеру и передатчик. Антенны приемника вывел в прорезь в верхней пластине рамы. Там же разместил стяжки, а к ним термоусадкой закрепил парочку трубочек от ватных палочек. В эти трубочки и засунул концы антенн.

Это позволит снимать верхнюю часть рамы без проблем. Все детали там на разъемах, а антенны жестко не зафиксированы.
Очень не понравилось крепление камеры. На двух винтиках еле держится. Надо придумать какое-то крепление за объектив. Так же сама камера никак не защищена от ударов.

На фотографии видно, что разъем камеры упирается в край полетного контроллера. Надо выбирать камеру с верхним расположением разъема, но продавались только с нижним, так что пришлось брать что есть.
Все готово! Сухой вес 340 грамм. Жаль, что второй квадрик-близнец еще не готов - ожидаемые запчасти застряли на выходе из таможни.

Первым делом проверил видео... и не обнаружил его. Перетряхнул все провода, проверил разъемы - ничего. Уже хотел снова все разбирать, но вспомнил, что у передатчика Eachine ET526 есть режим отключения видео-передачи. Проверил - точно! Передатчик просто ничего не передавал! Оно конечно хорошо, когда включаешь квадрик и рядом кто-то летает, то ему помех не будет. Но очень неудобно при каждом включении с трудом подлезать пальцем и включать передатчик. В общем, я немного обескуражен...
Установил в браузере Chrome конфигуратор BLHeli и через него обновил прошивку на регуляторах RacerStar RS30A V2. Поставил последнюю на текущий момент прошивку 16.53 с поддержкой цифрового протокола DSHOT.

Затем обновил прошивку в полетном контроллере через конфигуратор BetaFlight. Пока что прошивка с поддержкой цифрового протокола DSHOT находится в стадии тестирования, так что брать ее нужно здесь.

Про настройку DSHOT в прошивке BetaFlight читать здесь. Минимальные обороты настраиваются через консоль параметром digital_idle_percent. Например так:
set digital_idle_percent = 4.000
Для управления каналами передатчика Eachine ET526 подключил провод PWM к седьмому выходу полетного контроллера. В настройках включить опции SERVO_TILT и CHANNEL_FORWARDING. Именно они необходимы, чтобы иметь возможность вывести отдельный канал с приемника, подключенного через шину S.BUS, на выход полетного контроллера.

После этого можно назначить вывод сигнала с какого-либо из AUX-каналов приемника на выход полетного контроллера в разделе Servos. Я назначил на первый вывод для сервоприводов канал AUX5.

В прошивке BetaFlight выводы под сервоприводы начинаются с седьмого выхода. Не знаю почему так, но седьмой вывод соответствует данным из строки Servo0, восьмой - Servo1 и так далее.
На прошивке BetaFlight версии 3.0.1 переключение каналов передатчика Eachine ET526 прекрасно работало, а на бета-версии с поддержкой DSHOT пока что не работает. Как говорится, ждем релиза:)
Про остальные настройки прошивки BetaFlight можно еще очень долго рассказывать, но это тема больше подходит для отдельной статьи. Так что просто приведу здесь текущие настройки. Пока еще не настроены PID-ы, расходы и экспоненты. Это все можно настроить во время полетов с помощью приложения для телефона PIDFlight. Модель для передатчика DEVO-10 так же прилагаю, может кому пригодится.
Пропеллеры KingKong 5x4x3 из комплекта как нельзя кстати подходят для моторов RacerStar BR2205 2300kV. Ну может быть еще новые DALPROP T5045C Cyclone подойдут. Моторы не очень мощные, нужны легкие пропеллеры, чтобы квадрик динамично реагировал на изменения газа.
Первый облет состоялся визуально в комнате. Была проверка работоспособности всех систем. Никаких проблем пока выявлено не было. Только что не попробовал полет в режиме стабилизации. Побоялся, что не справлюсь с управлением, летал только в акро-режиме.
Следующий полет был уже на улице. Как раз и с погодой повезло. Ветра не было и было тепло.
Во время испытаний выявилась одна неприятная проблема - пропадает видео. Причем остается черный экран. Если бы пропадало из-за связи передатчика с приемником, то на экране был бы снег. Если бы просто отключалась камера, то был бы черный экран с данными OSD. А если остается просто черный экран, значит видео пропадает на выходе с OSD перед поступлением в передатчик. Стал думать, почему такое может происходить. Перед этим собирал квадрик так же с HUBOSD и там никаких проблем с видео не было. Напряжение на выходе BEC на плате PDB было 5.13 вольт. Но и подключены туда были только светодиоды и камера. Полетный контроллер имел свой BEC на 5 вольт, от которого питался и приемник.
В данной конфигурации на BEC 5 вольт подключены светодиоды, полетный контроллер, камера и приемник. Напряжение на выходе получается 4.85 вольта. При резкой подаче газа напряжение просаживается еще чуть ниже, что видно по показаниям телеметрии, приходящей на пульт. Микросхема OSD, кстати очень чувствительная к просадкам напряжения ниже пяти вольт, просто отключается. Но я не думаю, что это из-за слабого BEC на 5 вольт. Он импульсный, построен на стабилизаторе MP2315, способен выдерживать ток до 3А. Вряд ли вся связка потребляет больше. Скорее всего, причина в изначально низком напряжении на шине 5 вольт, которое слегка просаживается при нагрузке. Стабилизатор напряжения регулируемый. Если нормально подобрать регулирующее сопротивление, то проблема исчезнет. Осталось найти по разводке это самое регулирующее сопротивление:) Частично может решить проблему установка большого конденсатора на шину 5 вольт. Но, на мой взгляд, это костыль, так как при длительной нагрузке емкости конденсатора все равно не хватит на поддержание напряжения на достаточном уровне. В конце силового маневра может случиться неожиданный сюрприз с пропаданием видео:) Ладно, буду разбираться...
Запчасти для брата-близнеца этого квадрика через пару дней уже будут у меня. Все готово для его быстрой сборки. Если бы я продолжил сборку, используя плату Matek PBD, то мог бы получить те же самые проблемы с пропаданием видео.
Общий вывод по комплекту - вполне годный, рабочий. Подходит для повседневного использования. Комплектующие недорогие и всегда есть в продаже. Регуляторы RacerStar RS30A V2, после небольшой модификации, прекрасно работают с новым цифровым протоколом DSHOT-600. Моторы RacerStar BR2205 2300kV стоят совсем недорого и заменить их не будет проблемой, если повредятся. Квадрик получился очень послушный в управлении. Даже новичок с ним легко справится. На этом все, удачных полетов!
Спасибо за статью. Очень полезна!
ОтветитьУдалить> Пришлось бы либо регуляторы силовыми ключами к раме разворачивать, либо провода крест-накрест делать. Я выбрал второе, хотя оно и менее эстетично.
ОтветитьУдалитьВ чем проблема поставить ключами к раме?
Боюсь, что будут перегреваться.
УдалитьВ последнее время маржу много "рабочих" метров с ключами к раме. Кроме того, слои термоусадка и изоленты не смогут обеспечить эффективного теплоотвода при любом расположение ключей. Сугубо моё IMHO
УдалитьПопробую на близнеце примотать ключами к раме, самому интересно, сгорит или нет:) Как раз сегодня получил еще одну плату HUBOSD, но сразу ее немного модифицировал, чтобы видео не пропадало. Если модификация будет удачной, то позже расскажу о ней.
УдалитьСпасибо! У меня тоже передатчик ЕТ526. Но у меня он запоминает настройки. Если передатчик включить на определенную мощность то при переподключении акума он будет на этой мощности и работать.
ОтветитьУдалитьПоясните по поводу переключения каналов. Я думал что с помощью PWM можно регулировать мощность передатчика. У меня контроллер OZE32, там нет 7го провода. Могу я подключить передатчик напрямую к свободному PWM каналу приемника?
Я тоже думал про мощность, а оказалось переключение каналов. Выставляешь например сетку RaceBand и можешь переключать каналы в этой сетке прямо с пульта. Довольно удобно, если летаешь не один и к передатчику трудно подлезать для переключения. К приемнику подключить можно без проблем, если есть куда. У приемника с S.BUS всего один выход:)
Удалить16.53 это версия из репозитория cleanflight/blheli-multishot, её есть смысл ставить только если хотите нестандартные мелодии при инициализации контроллера.
ОтветитьУдалитьDSHOT есть и в 16.5
Просто 16.53 была последней в списке конфигуратора:)
УдалитьЯ её специально поместил ниже 16.5 в списке. В следующей версии добавлю какую-нибудь пометку, чтобы различать bitdump/BLHeli и cleanflight/blheli-multishot репозитории. :)
УдалитьКак же жаль, что в BLHeli_S больше нет поддержки хвоста и основного движка для вертолетов. Начиная с версии 12.1, хвост перестал работать. Регулятор не понимал сигнал ШИМ. Да и по железу не было разнообразия регуляторов с быстрыми ключами. Теперь есть регуляторы с быстрыми ключами, но нет поддержки хвоста в прошивке BLHeli_S:( Грусть-печаль:( Именно из-за этого я положил болт на микровертолеты, о чем очень сожалею.
УдалитьДля работы BLHeli Passthrough уже давненько не нужно выбирать Motor Protocol отличный от DSHOT, это было исправлено где-то в около сборки 750.
ОтветитьУдалитьДа, есть такое, залил вчера новую версию - уже все работает!
Удалитьможет не по теме но все же для прошивки minimosd получил FTDI1232 подключаю к ПК лампочка на нем красная горит но новых устройств не появляется :( адаптер не рабочий?
ОтветитьУдалитьУ меня другая система, но могу предположить, что нужны отдельные драйвера. Ссылка должна быть на странице товара. Да еще и эти драйвера могут вставать только без проверки их подписи:)
Удалить"У меня другая система" это как? и по поводу драйверов эта штуковина после подключения компьютер не издает звуков подключения нового устройства и в диспетчере тоже ничего нового :( скоро получу квадрик и хотелось приступать к доработке а осд прошить не получается :(
УдалитьУ меня Линукс уже лет ...тцать. Там драйвера ставить не нужно. Просто воткнул и оно работает.
Удалитьой да че ж я спрашивал я видел на видео с юсб свистком, что вы на линуксе :) а дрова нашел на сайте ftdi буду пробовать :) и да мой wizard x220 почти у меня и бенги деньги вернули потому что никаких новостей по поводу доставки не было более 2 месяцев... вернули денежку и на сл день трекнулся квадрик уже в стране :)
Удалить